55 _ 谈谈Kubernetes的存储设计理念 你好,我是周志明。从这节课起,我会用三讲带你学习容器编排系统存储方面的知识点。今天这节课,我们先来探讨下Kubernetes的存储设计理念。
Kubernetes的存储设计考量
在开始之前,我想先表明一下我对Kubernetes存储能力的态度。Kubernetes在规划持久化存储能力的时候,依然遵循着它的一贯设计哲学,用户负责以资源和声明式API来描述自己的意图,Kubernetes负责根据用户意图来完成具体的操作。不过我认为,就算只是描述清楚用户的存储意图,也不是一件容易的事情,相比Kubernetes提供的其他能力的资源,它内置的存储资源其实格外地复杂,甚至可以说是有些繁琐的。
如果你是Kubernetes的拥趸,不能认同我对Kubernetes的批评,那不妨来看一看下列围绕着“Volume”所衍生出的概念,它们仅仅是与Kubernetes存储相关概念的一个子集而已,你在看的时候也可以来思考一下,这些概念是否全都是必须的、是否还有整合的空间、是否有化繁为简的可能性: 概念:Volume、PersistentVolume、PersistentVolumeClaim、Provisioner、StorageClass、Volume Snapshot、Volume Snapshot Class、Ephemeral Volumes、FlexVolume Driver、Container Storage Interface、CSI Volume Cloning、Volume Limits、Volume Mode、Access Modes、Storage Capacity……- 操作:Mount、Bind、Use、Provision、Claim、Reclaim、Reserve、Expand、Clone、Schedule、Reschedule……
其实啊,Kubernetes之所以有如此多关于存储的术语概念,最重要的原因是存储技术本来就有很多种类,为了尽可能多地兼容各种存储,Kubernetes不得不预置了很多In-Tree(意思是在Kubernetes的代码树里)插件来对接,让用户根据自己的业务按需选择。
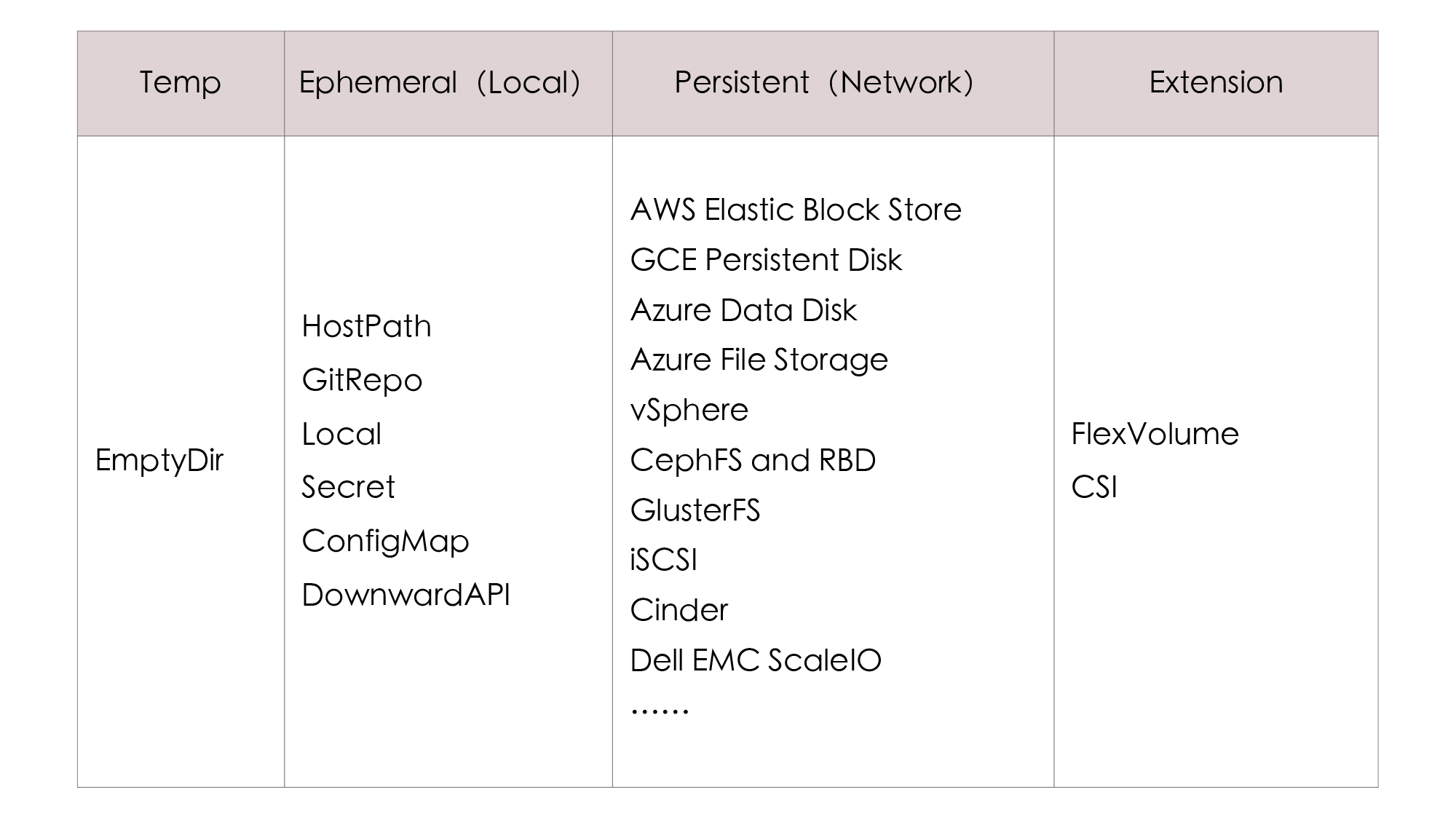
同时,为了兼容那些不在预置范围内的需求场景,Kubernetes也支持用户使用FlexVolume或者CSI来定制Out-of-Tree(意思是在Kubernetes的代码树之外)的插件,实现更加丰富多样的存储能力。下表中列出了Kubernetes目前提供的一部分存储与扩展的插件:
事实上,迫使Kubernetes存储设计得如此复杂的原因,除了是要扩大兼容范畴之外,还有一个非技术层面的因素,就是Kubernetes是一个工业级的、面向生产应用的容器编排系统。
而这就意味着,即使Kubernetes发现了某些已存在的功能有更好的实现方式,但直到旧版本被淘汰出生产环境以前,原本已支持的功能都不允许突然间被移除或者替换掉。否则,当生产系统更新版本时,已有的功能就会出现异常,那就会极大威胁到产品的信誉。
当然,在一定程度上,我们可以原谅Kubernetes为了实现兼容而导致的繁琐,但这样的设计确实会让Kubernetes的学习曲线变得更加陡峭。
Kubernetes提供的官方文档的主要作用是为实际开发提供参考,它并不会告诉你Kubernetes中各种概念的演化历程、版本发布新功能的时间线、改动的缘由与背景等信息,只会以“平坦”的方式来陈述所有目前可用的功能,这可能有利于熟练的管理员快速查询到关键信息,却不利于初学者去理解Kubernetes的设计思想。
如此一来,因为很难理解那些概念和操作的本意,初学者往往就只能死记硬背,很难分辨出它们应该如何被“更正确”地使用。而介绍Kubernetes设计理念的职责,只能由Kubernetes官方的Blog 这类信息渠道,或者其他非官方资料去完成。
所以接下来,我会从Volume的概念开始,以操作系统到Docker,再到Kubernetes的演进历程为主线,带你去梳理前面提到的那些概念与操作,以此帮你更好地理解Kubernetes的存储设计。
首先,我们来看看Mount和Volume这两个概念。
Mount和Volume
Mount和Volume都是来源于操作系统的常用术语,Mount是动词,表示将某个外部存储挂载到系统中;Volume是名词,表示物理存储的逻辑抽象,目的是为物理存储提供有弹性的分割方式。
而我们知道,容器是源于对操作系统层的虚拟化,为了满足容器内生成数据的外部存储需求,我们也很自然地会把Mount和Volume的概念延至容器中。因此,要想了解容器存储的发展,我们不妨就以Docker的Mount操作为起始点。
目前,Docker内建支持了三种挂载类型,分别是Bind(
–mount type=bind )、Volume(
–mount type=volume )和tmpfs(
–mount type=tmpfs ),如下图所示。其中,tmpfs主要用于在内存中读写临时数据,跟我们这个小章节要讨论的对象“持久化存储”并不相符,所以后面我们只着重关注Bind和Volume两种挂载类型就可以了。
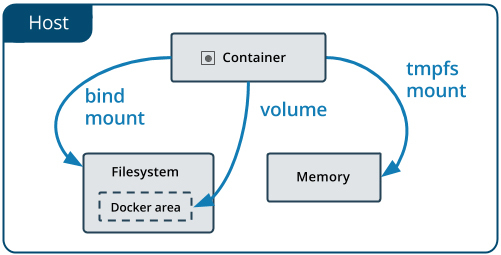
(图片来自Docker官网文档)
我们先来聊聊Bind。
Bind Mount是Docker最早提供的(发布时就支持)挂载类型,作用是把宿主机的某个目录(或文件)挂载到容器的指定目录(或文件)下,比如下面命令中,参数
-v 表达的意思就是把外部的HTML文档,挂到Nginx容器的默认网站根目录下: docker run -v /icyfenix/html:/usr/share/nginx/html nginx:latest
请注意,虽然命令中
-v 参数是
–volume 的缩写,但
-v 最初只是用来创建Bind Mount,而不是创建Volume Mount的。
这种迷惑的行为其实也并不是Docker的本意,只是因为Docker刚发布的时候考虑得不够周全,随随便便就在参数中占用了“Volume”这个词,到后来真的需要扩展Volume的概念来支持Volume Mount的时候,前面的
-v 已经被用户广泛使用了,所以也就只能如此将就着继续用。
从Docker 17.06版本开始,Bind就在Docker Swarm中借用了
–mount 参数过来,这个参数默认创建的是Volume Mount,用户可以通过明确的type子参数来指定另外两种挂载类型。比如说,前面给到的命令,就可以等价于下面所示的
–mount 版本: docker run –mount type=bind,source=/icyfenix/html,destination=/usr/share/nginx/html nginx:latest
从Bind Mount到Volume Mount,实质上是容器发展过程中对存储抽象能力提升的外在表现。我们根据“Bind”这个名字,以及Bind Mount的实际功能,其实可以合理地推测,Docker最初认为“Volume”就只是一种“外部宿主机的磁盘存储到内部容器存储的映射关系”,但后来它眉头一皱,发现事情并没有那么简单:存储的位置并不局限只在外部宿主机,存储的介质并不局限只是物理磁盘,存储的管理也并不局限只有映射关系。
我给你举几个例子。
比如,Bind Mount只能让容器与本地宿主机之间建立某个目录的映射,那么如果想要在不同宿主机上的容器共享同一份存储,就必须先把共享存储挂载到每一台宿主机操作系统的某个目录下,然后才能逐个挂载到容器内使用,这种跨宿主机共享存储的场景如下图所示:
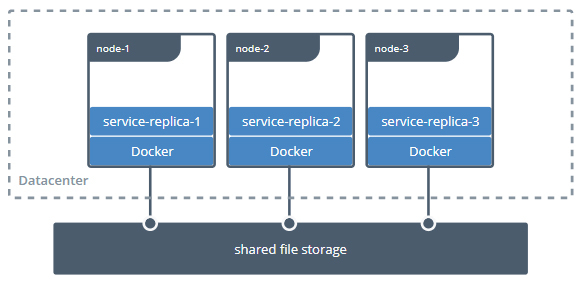
(图片来自Docker官网文档)
这种存储范围超越了宿主机的共享存储,配置过程却要涉及到大量与宿主机环境相关的操作,只能由管理员人工地去完成,不仅繁琐,而且由于每台宿主机环境的差异,还会导致主机很难实现自动化。
再比如,即使只考虑单台宿主机的情况,基于可管理性的需求,Docker也完全有支持Volume Mount的必要。为什么这么说呢?
实际上,在Bind Mount的设计里,Docker只有容器的控制权,存放容器生产数据的主机目录是完全独立的,与Docker没有任何关系,它既不受Docker保护,也不受Docker管理。所以这就使得数据很容易被其他进程访问到,甚至是被修改和删除。如果用户想对挂载的目录进行备份、迁移等管理运维操作,也只能在Docker之外靠管理员人工进行,而这些都增加了数据安全与操作意外的风险。
因此,Docker希望能有一种抽象的资源,来代表在宿主机或网络中存储的区域,以便让Docker能管理这些资源,这样就很自然地联想到了操作系统里的Volume。
提出Volume最核心的一个目的,是为了提升Docker对不同存储介质的支撑能力,这同时也是为了减轻Docker本身的工作量。
要知道,存储并不是只有挂载在宿主机上的物理存储这一种介质。在云计算时代,网络存储逐渐成为了数据中心的主流选择,不同的网络存储都有各自的协议和交互接口。而且,并不是所有的存储系统都适合先挂载到操作系统,然后再挂载到容器的,如果Docker想要越过操作系统去支持挂载某种存储系统,首先必须要知道该如何访问它,然后才能把容器中的读写操作自动转移到该位置。
Docker把解决如何访问存储的功能模块叫做存储驱动(Storage Driver)。通过
docker info 命令,你能查看到当前Docker所支持的存储驱动。虽然Docker已经内置了市面上主流的OverlayFS驱动,比如Overlay、Overlay2、AUFS、BTRFS、ZFS等等,但面对云计算的快速迭代,只靠Docker自己来支持全部云计算厂商的存储系统是完全不现实的。
为此,Docker就提出了与Storage Driver相对应的Volume Driver(卷驱动)的概念。
我们可以通过
docker plugin install 命令安装外部的卷驱动,并在创建Volume时,指定一个与其存储系统相匹配的卷驱动。比如,我们希望数据存储在AWS Elastic Block Store上,就找一个AWS EBS的驱动;如果想存储在Azure File Storage上,也是找一个对应的Azure File Storage驱动即可。
而如果在创建Volume时,不指定卷驱动,那默认就是local类型,在Volume中存放的数据就会存储在宿主机的
/var/lib/docker/volumes/ 目录之中。
Static Provisioning
好了,了解了Mount和Volume的概念含义之后,现在我们把讨论主角转回容器编排系统上。
这里,我们会从存储如何分配、持久存储与非持久存储的差异出发,来具体学习下Static Provisioning的设计。
首先我们可以明确一件事,即Kubernetes同样是把操作系统和Docker的Volume概念延续了下来,并对其进行了进一步的细化。
Kubernetes把Volume分为了持久化的PersistentVolume和非持久化的普通Volume两类,这里为了不跟我前面定义的Volume这个概念产生混淆,后面课程我提到的Kubernetes中非持久化的Volume时,都会带着“普通”这个前缀。
普通Volume的设计目标并不是为了持久地保存数据,而是为同一个Pod中多个容器提供可共享的存储资源,所以普通Volume的生命周期非常明确,也就是与挂载它的Pod有着相同的生命周期。
这样,就意味着尽管普通Volume不具备持久化的存储能力,但至少比Pod中运行的任何容器的存活期都更长,Pod中不同的容器能共享相同的普通Volume,当容器重新启动时,普通Volume中的数据也能够得到保留。
当然,一旦整个Pod被销毁,普通Volume也就不复存在了,数据在逻辑上也会被销毁掉。至于实际中是否会真正删除数据,就取决于存储驱动具体是如何实现Unmount、Detach、Delete接口的(这个小章节的主题是“持久化存储”,所以关于无持久化能力的普通Volume,我就不再展开了)。
如此一来,从操作系统里传承下来的Volume概念,就在Docker和Kubernetes中继续按照一致的逻辑延伸拓展了,只不过Kubernetes为了把它跟普通Volume区别开来,专门取了PersistentVolume这个名字。你可以从下图中直观地看出普通Volume、PersistentVolume和Pod之间的关系差异:
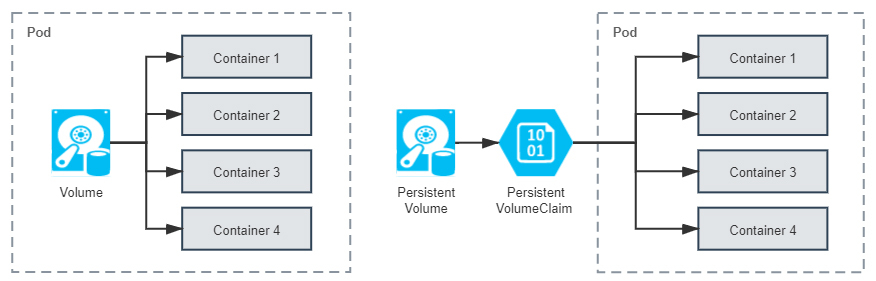
其实,我们从Persistent这个单词的意思,就能大致了解PersistentVolume的含义,它是指能够将数据进行持久化存储的一种资源对象。
PersistentVolume可以独立于Pod存在,生命周期与Pod无关,所以也就决定了PersistentVolume不应该依附于任何一个宿主机节点,否则必然会对Pod调度产生干扰限制。我们在前面“Docker的三种挂载类型”图例中,可以看到“Persistent”一列里都是网络存储,这便是很好的印证。 额外知识:Local PersistentVolume-
对于部署在云端数据中心的系统,通过网络访问同一个可用区中的远程存储,速度是完全可以接受的。但对于私有部署的系统来说,基于性能考虑,使用本地存储往往会更加常见。-
因此,考虑到这样的实际需求,从1.10版起,Kubernetes开始支持Local PersistentVolume,这是一种将一整块本地磁盘作为PersistentVolume供容器使用的专用方案。-
所谓的“专用方案”就是字面意思,它并不适用于全部应用,Local PersistentVolume只是针对以磁盘I/O为瓶颈的特定场景的解决方案,因而它的副作用就很明显:由于不能保证这种本地磁盘在每个节点中都一定存在,所以Kubernetes在调度时就必须考虑到PersistentVolume分布情况,只能把使用了Local PersistentVolume的Pod调度到有这种PersistentVolume的节点上。-
尽管调度器中专门有个Volume Binding Mode模式来支持这项处理,但是一旦使用了Local PersistentVolume,还是会限制Pod的可调度范围。
那么,在把PersistentVolume与Pod分离后,就需要专门考虑PersistentVolume该如何被Pod所引用的问题了。
实际上,原本在Pod中引用其他资源是常有的事,要么是通过资源名称直接引用,要么是通过标签选择器(Selectors)间接引用。但是类似的方法在这里却都不太妥当,至于原因,你可以先思考一下:“Pod该使用何种存储”这件事情,应该是系统管理员(运维人员)说的算,还是由用户(开发人员)说的算?
要我看,最合理的答案是他们一起说的才算,因为只有开发能准确评估Pod运行需要消耗多大的存储空间,只有运维能清楚地知道当前系统可以使用的存储设备状况。
所以,为了让这二者能够各自提供自己擅长的信息,Kubernetes又额外设计出了PersistentVolumeClaim资源。
其实在Kubernetes官方给出的概念定义中,也特别强调了PersistentVolume是由管理员(运维人员)负责维护的,用户(开发人员)通过PersistentVolumeClaim,来匹配到合乎需求的PersistentVolume。 PersistentVolume & PersistentVolumeClaim- A PersistentVolume (PV) is a piece of storage in the cluster that has been provisioned by an administrator.- A PersistentVolumeClaim (PVC) is a request for storage by a user.- PersistentVolume是由管理员负责提供的集群存储。- PersistentVolumeClaim是由用户负责提供的存储请求。- —— Kubernetes Reference Documentation,Persistent Volumes
PersistentVolume是Volume这个抽象概念的具象化表现,通俗点儿说,即它是已经被管理员分配好的具体的存储。
这里的“具体”是指有明确的存储系统地址,有明确的容量、访问模式、存储位置等信息;而PersistentVolumeClaim是Pod对其所需存储能力的声明,通俗地说就是“如果要满足这个Pod正常运行,需要满足怎样的条件”,比如要消耗多大的存储空间、要支持怎样的访问方式。
所以,实际上管理员和用户并不是谁引用谁的固定关系,而是根据实际情况动态匹配的。
下面我们就来看看这两者配合工作的具体过程:
- 管理员准备好要使用的存储系统,它应该是某种网络文件系统(NFS)或者云储存系统,一般来说应该具备跨主机共享的能力。
- 管理员会根据存储系统的实际情况,手工预先分配好若干个PersistentVolume,并定义好每个PersistentVolume可以提供的具体能力。如下面例子所示: apiVersion: v1 kind: PersistentVolume metadata: name: nginx-html spec: capacity: storage: 5Gi /# 最大容量为5GB accessModes: - ReadWriteOnce /# 访问模式为RXO persistentVolumeReclaimPolicy: Retain /# 回收策略是Retain nfs: /# 存储驱动是NFS path: /html server: 172.17.0.2
这里我们来简单分析下以上YAML中定义的存储能力:
- 存储的最大容量是5GB。
- 存储的访问模式是“只能被一个节点读写挂载”(ReadWriteOnce,RWO),另外两种可选的访问模式是“可以被多个节点以只读方式挂载”(ReadOnlyMany,ROX)和“可以被多个节点读写挂载”(ReadWriteMany,RWX)。
- 存储的回收策略是Retain,即在Pod被销毁时并不会删除数据。另外两种可选的回收策略分别是Recycle ,即在Pod被销毁时,由Kubernetes自动执行
rm -rf /volume//* 这样的命令来自动删除资料;以及Delete,它让Kubernetes自动调用AWS EBS、GCE PersistentDisk、OpenStack Cinder这些云存储的删除指令。
-
存储驱动是NFS,其他常见的存储驱动还有AWS EBS、GCE PD、iSCSI、RBD(Ceph Block Device)、GlusterFS、HostPath,等等。
-
用户根据业务系统的实际情况,创建PersistentVolumeClaim,声明Pod运行所需的存储能力。如下面例子所示: kind: PersistentVolumeClaim apiVersion: v1 metadata: name: nginx-html-claim spec: accessModes: - ReadWriteOnce /# 支持RXO访问模式 resources: requests: storage: 5Gi /# 最小容量5GB
可以看到,在以上YAML中,声明了要求容量不得小于5GB,必须支持RWO的访问模式。
- Kubernetes在创建Pod的过程中,会根据系统中PersistentVolume与PersistentVolumeClaim的供需关系,对两者进行撮合,如果系统中存在满足PersistentVolumeClaim声明中要求能力的PersistentVolume,就表示撮合成功,它们将会被绑定。而如果撮合不成功,Pod就不会被继续创建,直到系统中出现新的、或让出空闲的PersistentVolume资源。
- 以上几步都顺利完成的话,意味着Pod的存储需求得到满足,进而继续Pod的创建过程。
以上的整个运作过程如下图所示:
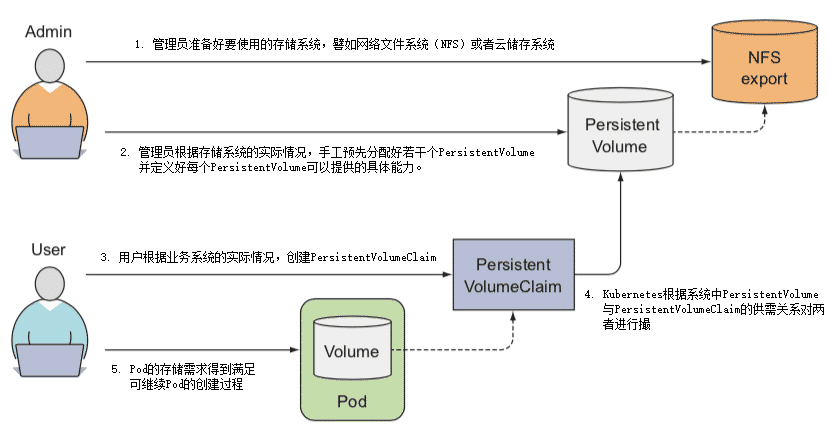
(图片来自《Kubernetes in Action》)
Kubernetes对PersistentVolumeClaim与PersistentVolume撮合的结果是产生一对一的绑定关系,“一对一”的意思是PersistentVolume一旦绑定在某个PersistentVolumeClaim上,直到释放以前都会被这个PersistentVolumeClaim所独占,不能再与其他PersistentVolumeClaim进行绑定。
这意味着即使PersistentVolumeClaim申请的存储空间比PersistentVolume能够提供的要少,依然要求整个存储空间都为该PersistentVolumeClaim所用,这有可能会造成资源的浪费。
比如,某个PersistentVolumeClaim要求3GB的存储容量,当前Kubernetes手上只剩下一个5GB的PersistentVolume了,此时Kubernetes只好将这个PersistentVolume与申请资源的PersistentVolumeClaim进行绑定,平白浪费了2GB空间。
假设后续有另一个PersistentVolumeClaim申请2GB的存储空间,那它也只能等待管理员分配新的PersistentVolume,或者有其他PersistentVolume被回收之后,才被能成功分配。
Dynamic Provisioning
对于中小规模的Kubernetes集群,PersistentVolume已经能够满足有状态应用的存储需求。PersistentVolume依靠人工介入来分配空间的设计虽然简单直观,却算不上是先进,一旦应用规模增大,PersistentVolume很难被自动化的问题就会凸显出来。
这是由于Pod创建过程中需要去挂载某个Volume时,都要求该Volume必须是真实存在的,否则Pod启动可能依赖的数据(如一些配置、数据、外部资源等)都将无从读取。Kubernetes虽然有能力随着流量压力和硬件资源状况,自动扩缩Pod的数量,但是当Kubernetes自动扩展出一个新的Pod后,并没有办法让Pod去自动挂载一个还未被分配资源的PersistentVolume。
想解决这个问题,要么允许多个不同的Pod都共用相同的PersistentVolumeClaim,这种方案确实只靠PersistentVolume就能解决,却损失了隔离性,难以通用;要么就要求每个Pod用到的PersistentVolume都是已经被预先建立并分配好的,这种方案靠管理员提前手工分配好大量的存储也可以实现,却损失了自动化能力。
无论哪种情况,都难以符合Kubernetes工业级编排系统的产品定位,对于大型集群,面对成百上千,来自成千上万的Pod,靠管理员手工分配存储肯定是无法完成的。在2017年Kubernetes发布1.6版本后,终于提供了今天被称为Dynamic Provisioning的动态存储解决方案,让系统管理员摆脱了人工分配的PersistentVolume的窘境,并把此前的分配方式称为Static Provisioning。
那Dynamic Provisioning方案是如何解放系统管理员的呢?我们先来看概念,Dynamic Provisioning方案是指在用户声明存储能力的需求时,不是期望通过Kubernetes撮合来获得一个管理员人工预置的PersistentVolume,而是由特定的资源分配器(Provisioner)自动地在存储资源池或者云存储系统中分配符合用户存储需要的PersistentVolume,然后挂载到Pod中使用,完成这项工作的资源被命名为StorageClass,它的具体工作过程如下:
- 管理员根据储系统的实际情况,先准备好对应的Provisioner。Kubernetes官方已经提供了一系列预置的In-Tree Provisioner,放置在
kubernetes.io 的API组之下。其中部分Provisioner已经有了官方的CSI驱动,如vSphere的Kubernetes自带驱动为
kubernetes.io/vsphere-volume ,VMware的官方驱动为
csi.vsphere.vmware.com 。
-
管理员不再是手工去分配PersistentVolume,而是根据存储去配置StorageClass。Pod是可以动态扩缩的,而存储则是相对固定的,哪怕使用的是具有扩展能力的云存储,也会将它们视为存储容量、IOPS等参数可变的固定存储来看待,比如你可以将来自不同云存储提供商、不同性能、支持不同访问模式的存储配置为各种类型的StorageClass,这也是它名字中“Class”(类型)的由来,如下面这个例子: apiVersion: storage.k8s.io/v1 kind: StorageClass metadata: name: standard provisioner: kubernetes.io/aws-ebs /#AWS EBS的Provisioner parameters: type: gp2 reclaimPolicy: Retain
-
用户依然通过PersistentVolumeClaim来声明所需的存储,但是应在声明中明确指出该由哪个StorageClass来代替Kubernetes处理该PersistentVolumeClaim的请求,如下面这个例子: apiVersion: v1 kind: PersistentVolumeClaim metadata: name: standard-claim spec: accessModes: - ReadWriteOnce storageClassName: standard /#明确指出该由哪个StorageClass来处理该PersistentVolumeClaim的请求 resource: requests: storage: 5Gi
- 如果PersistentVolumeClaim中要求的StorageClass及它用到的Provisioner均是可用的话,那这个StorageClass就会接管掉原本由Kubernetes撮合的PersistentVolume和PersistentVolumeClaim的操作,按照PersistentVolumeClaim中声明的存储需求,自动产生出满足该需求的PersistentVolume描述信息,并发送给Provisioner处理。
- Provisioner接收到StorageClass发来的创建PersistentVolume请求后,会操作其背后存储系统去分配空间,如果分配成功,就生成并返回符合要求的PersistentVolume给Pod使用。
- 前面这几步都顺利完成的话,就意味着Pod的存储需求得到了满足,会继续Pod的创建过程,整个过程如下图所示。
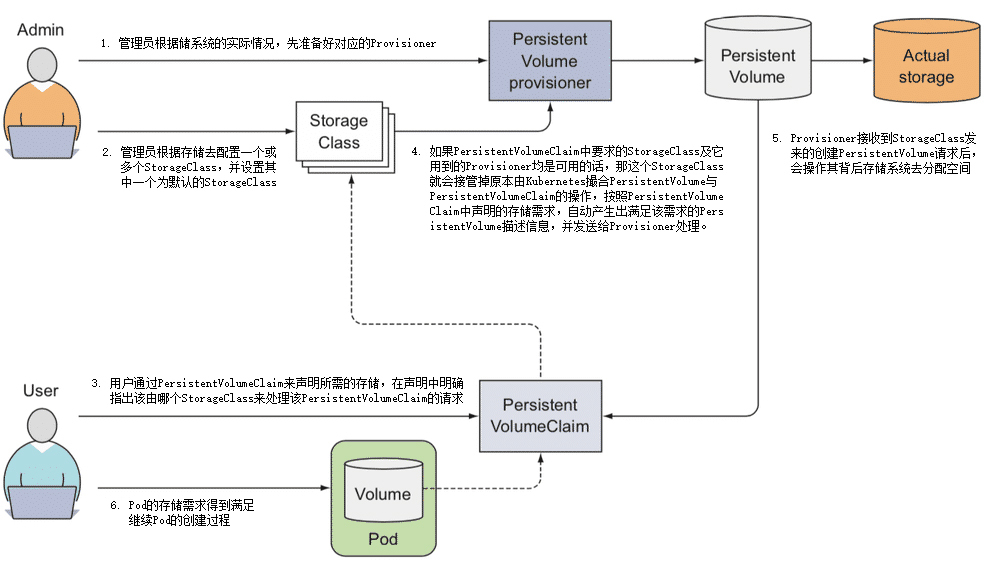
(图片来自《Kubernetes in Action》)
好了,通过刚刚的讲述,相信你可以看出Dynamic Provisioning与Static Provisioning并不是各有用途的互补设计,而是对同一个问题先后出现的两种解决方案。你完全可以只用Dynamic Provisioning来实现所有的Static Provisioning能够实现的存储需求,包括那些不需要动态分配的场景,甚至之前例子里使用HostPath在本地静态分配存储,都可以指定
no-provisioner 作为Provisioner的StorageClass,以Local Persistent Volume来代替,比如下面这个例子: apiVersion: storage.k8s.io/v1 kind: StorageClass metadata: name: local-storage provisioner: kubernetes.io/no-provisioner volumeBindingMode: WaitForFirstConsumer
所以说,相较于Static Provisioning,使用Dynamic Provisioning来分配存储无疑是更合理的设计,不仅省去了管理员的人工操作的中间层,也不再需要将PersistentVolume这样的概念暴露给最终用户,因为Dynamic Provisioning里的PersistentVolume只是处理过程的中间产物,用户不再需要接触和理解它,只需要知道由PersistentVolumeClaim去描述存储需求,由StorageClass去满足存储需求即可。只描述意图而不关心中间具体的处理过程是声明式编程的精髓,也是流程自动化的必要基础。
除此之外,由Dynamic Provisioning来分配存储还能获得更高的可管理性。如前面提到的回收策略,当希望PersistentVolume跟随Pod一同被销毁时,以前经常会配置回收策略为Recycle来回收空间,即让系统自动执行
rm -rf /volume//* 命令。
但是这种方式往往过于粗暴,要是遇到更精细的管理需求,如“删除到回收站”或者“敏感信息粉碎式彻底删除”这样的功能,实现起来就很麻烦。而Dynamic Provisioning中由于有Provisioner的存在,如何创建、如何回收都是由Provisioner的代码所管理的,这就带来了更高的灵活性。所以,现在Kubernetes官方已经明确建议废弃掉Recycle策略,如果有这类需求就改由Dynamic Provisioning去实现了。
另外,相较于Dynamic Provisioning,Static Provisioning的主要使用场景就局限于管理员能够手工管理存储的小型集群,它符合很多小型系统,尤其是私有化部署系统的现状,但并不符合当今运维自动化所提倡的思路。Static Provisioning的存在,某种意义上也可以视为是对历史的一种兼容,在可见的将来,Kubernetes肯定还是会把Static Provisioning作为用户分配存储的一种主要方案,来供用户选用。
小结
容器是镜像的运行时实例,为了保证镜像能够重复地产生出具备一致性的运行时实例,必须要求镜像本身是持久而稳定的,这就决定了在容器中发生的一切数据变动操作,都不能真正写入到镜像当中,否则必然会破坏镜像稳定不变的性质。
为此,容器中的数据修改操作,大多是基于写入时复制(Copy-on-Write)策略来实现的,容器会利用叠加式文件系统(OverlayFS)的特性,在用户意图对镜像进行修改时,自动将变更的内容写入到独立区域,再与原有数据叠加到一起,使其外观上看起来像是“覆盖”了原有内容。这种改动通常都是临时的,一旦容器终止运行,这些存储于独立区域中的变动信息也将被一并移除,不复存在。所以可见,如果不去进行额外的处理,容器默认是不具备持久化存储能力的。
而另一方面,容器作为信息系统的运行载体,必定会产生出有价值的、应该被持久保存的信息,比如扮演数据库角色的容器,大概没有什么系统能够接受数据库像缓存服务一样,重启之后会丢失全部数据;多个容器之间也经常需要通过共享存储来实现某些交互操作,比如我在第48讲中曾经举过的例子,Nginx容器产生日志、Filebeat容器收集日志,两者就需要共享同一块日志存储区域才能协同工作。
而正因为镜像的稳定性与生产数据持久性存在矛盾,所以我们才需要去重点了解这个问题:如何实现容器的持久化存储。
一课一思
不知你是否察觉,这节课里,还埋藏了一条暗线的逻辑,以Kubernetes的存储为样例,讨论当新的更好的解决方案出来之后,系统对既有旧方案和旧功能的兼容。这是很多场景中都会遇到的问题,系统设计必须考虑现实情况,必须有所妥协,很难单纯去追求理论上的最优解。越大规模的应用,通常都带着更大的现实牵绊。如果你也有这样的经历,不妨留言与我分享一下。
如果你觉得有收获,也欢迎把今天的内容分享给更多的朋友。感谢你的阅读,我们下一讲再见。
参考资料
https://learn.lianglianglee.com/%e4%b8%93%e6%a0%8f/%e5%91%a8%e5%bf%97%e6%98%8e%e7%9a%84%e6%9e%b6%e6%9e%84%e8%af%be/55%20_%20%e8%b0%88%e8%b0%88Kubernetes%e7%9a%84%e5%ad%98%e5%82%a8%e8%ae%be%e8%ae%a1%e7%90%86%e5%bf%b5.md
- Kubernetes的存储设计考量
- Mount和Volume
- Static Provisioning
- 对于部署在云端数据中心的系统,通过网络访问同一个可用区中的远程存储,速度是完全可以接受的。但对于私有部署的系统来说,基于性能考虑,使用本地存储往往会更加常见。-
- 因此,考虑到这样的实际需求,从1.10版起,Kubernetes开始支持Local PersistentVolume,这是一种将一整块本地磁盘作为PersistentVolume供容器使用的专用方案。-
- 所谓的“专用方案”就是字面意思,它并不适用于全部应用,Local PersistentVolume只是针对以磁盘I/O为瓶颈的特定场景的解决方案,因而它的副作用就很明显:由于不能保证这种本地磁盘在每个节点中都一定存在,所以Kubernetes在调度时就必须考虑到PersistentVolume分布情况,只能把使用了Local PersistentVolume的Pod调度到有这种PersistentVolume的节点上。-
- Dynamic Provisioning
- 小结
- 一课一思
- 参考资料
更多学习
更多实时资讯,前沿技术,生活趣事。尽在【老马啸西风】
交流社群:[交流群信息](https://mp.weixin.qq.com/s/rkSvXxiiLGjl3S-ZOZCr0Q)
