09 瞧一瞧Linux:Linux的自旋锁和信号量如何实现? 你好,我是LMOS。
上节课,我们学习了解决数据同步问题的思路与方法。Linux作为成熟的操作系统内核,当然也有很多数据同步的机制,它也有原子变量、开启和关闭中断、自旋锁、信号量。
那今天我们就来探讨一下这些机制在Linux中的实现。看看Linux的实现和前面我们自己的实现有什么区别,以及Linux为什么要这么实现,这么实现背后的机理是什么。
Linux的原子变量
首先,我们一起来看看Linux下的原子变量的实现,在Linux中,有许多共享的资源可能只是一个简单的整型数值。
例如在文件描述符中,需要包含一个简单的计数器。这个计数器表示有多少个应用程序打开了文件。在文件系统的open函数中,将这个计数器变量加1;在close函数中,将这个计数器变量减1。
如果单个进程执行打开和关闭操作,那么这个计数器变量不会出现问题,但是Linux是支持多进程的系统,如果有多个进程同时打开或者关闭文件,那么就可能导致这个计数器变量多加或者少加,出现错误。
为了避免这个问题,Linux提供了一个原子类型变量atomic_t。该变量的定义如下。 typedef struct { int counter; } atomic_t;//常用的32位的原子变量类型 /#ifdef CONFIG_64BIT typedef struct { s64 counter; } atomic64_t;//64位的原子变量类型 /#endif
上述代码自然不能用普通的代码去读写加减,而是要用Linux专门提供的接口函数去操作,否则就不能保证原子性了,代码如下。
//原子读取变量中的值 static __always_inline int arch_atomic_read(const atomic_t /v) { return __READ_ONCE((v)->counter); } //原子写入一个具体的值 static __always_inline void arch_atomic_set(atomic_t /v, int i) { __WRITE_ONCE(v->counter, i); } //原子加上一个具体的值 static __always_inline void arch_atomic_add(int i, atomic_t /v) { asm volatile(LOCK_PREFIX “addl %1,%0” : “+m” (v->counter) : “ir” (i) : “memory”); } //原子减去一个具体的值 static __always_inline void arch_atomic_sub(int i, atomic_t /v) { asm volatile(LOCK_PREFIX “subl %1,%0” : “+m” (v->counter) : “ir” (i) : “memory”); } //原子加1 static __always_inline void arch_atomic_inc(atomic_t /v) { asm volatile(LOCK_PREFIX “incl %0” : “+m” (v->counter) :: “memory”); } //原子减1 static __always_inline void arch_atomic_dec(atomic_t /v) { asm volatile(LOCK_PREFIX “decl %0” : “+m” (v->counter) :: “memory”); }
Linux原子类型变量的操作函数有很多,这里我只是介绍了最基础的几个函数,其它的原子类型变量操作也依赖于上述几个基础的函数。
你会发现,Linux的实现也同样采用了x86 CPU的原子指令,LOCK_PREFIX是一个宏,根据需要展开成“lock;”或者空串。单核心CPU是不需要lock前缀的,只要在多核心CPU下才需要加上lock前缀。
剩下__READ_ONCE,__WRITE_ONCE两个宏,我们来看看它们分别做了什么,如下所示。 /#define __READ_ONCE(x) \ (/(const volatile __unqual_scalar_typeof(x) /)&(x)) /#define __WRITE_ONCE(x, val) \ do {/(volatile typeof(x) /)&(x) = (val);} while (0) //__unqual_scalar_typeof表示声明一个非限定的标量类型,非标量类型保持不变。说人话就是返回x变量的类型,这是GCC的功能,typeof只是纯粹返回x的类型。 //如果 x 是int类型则返回“int” /#define __READ_ONCE(x) \ (/(const volatile int /)&(x)) /#define __WRITE_ONCE(x, val) \ do {/(volatile int /)&(x) = (val);} while (0)
结合刚才的代码,我给你做个解读。Linux定义了__READ_ONCE,__WRITE_ONCE这两个宏,是对代码封装并利用GCC的特性对代码进行检查,把让错误显现在编译阶段。其中的“volatile int /*”是为了提醒编译器:这是对内存地址读写,不要有优化动作,每次都必须强制写入内存或从内存读取。
Linux控制中断
Linux中有很多场景,需要在关中断下才可以安全执行一些操作。
比如,多个中断处理程序需要访问一些共享数据,一个中断程序在访问数据时必须保证自身(中断嵌套)和其它中断处理程序互斥,否则就会出错。再比如,设备驱动程序在设置设备寄存器时,也必须让CPU停止响应中断。
Linux控制CPU响应中断的函数如下。 //实际保存eflags寄存器 extern __always_inline unsigned long native_save_fl(void){ unsigned long flags; asm volatile(“/# __raw_save_flags\n\t” “pushf ; pop %0”:”=rm”(flags)::”memory”); return flags; } //实际恢复eflags寄存器 extern inline void native_restore_fl(unsigned long flags){ asm volatile(“push %0 ; popf”::”g”(flags):”memory”,”cc”); } //实际关中断 static __always_inline void native_irq_disable(void){ asm volatile(“cli”:::”memory”); } //实际开启中断 static __always_inline void native_irq_enable(void){ asm volatile(“sti”:::”memory”); } //arch层关中断 static __always_inline void arch_local_irq_disable(void){ native_irq_disable(); } //arch层开启中断 static __always_inline void arch_local_irq_enable(void){ native_irq_enable(); } //arch层保存eflags寄存器 static __always_inline unsigned long arch_local_save_flags(void){ return native_save_fl(); } //arch层恢复eflags寄存器 static __always_inline void arch_local_irq_restore(unsigned long flags){ native_restore_fl(flags); } //实际保存eflags寄存器并关中断 static __always_inline unsigned long arch_local_irq_save(void){ unsigned long flags = arch_local_save_flags(); arch_local_irq_disable(); return flags; } //raw层关闭开启中断宏 /#define raw_local_irq_disable() arch_local_irq_disable() /#define raw_local_irq_enable() arch_local_irq_enable() //raw层保存恢复eflags寄存器宏 /#define raw_local_irq_save(flags) \ do { \ typecheck(unsigned long, flags); \ flags = arch_local_irq_save(); \ } while (0) /#define raw_local_irq_restore(flags) \ do { \ typecheck(unsigned long, flags); \ arch_local_irq_restore(flags); \ } while (0) /#define raw_local_save_flags(flags) \ do { \ typecheck(unsigned long, flags); \ flags = arch_local_save_flags(); \ } while (0) //通用层接口宏 /#define local_irq_enable() \ do { \ raw_local_irq_enable(); \ } while (0) /#define local_irq_disable() \ do { \ raw_local_irq_disable(); \ } while (0) /#define local_irq_save(flags) \ do { \ raw_local_irq_save(flags); \ } while (0) /#define local_irq_restore(flags) \ do { \ raw_local_irq_restore(flags); \ } while (0)
可以发现,Linux中通过定义的方式对一些底层函数进行了一些包装,为了让你抓住重点,前面这些宏我去掉了和中断控制无关的额外操作,详细信息你可以参阅相关代码。
编译Linux代码时,编译器自动对宏进行展开。其中,do{}while(0)是Linux代码中一种常用的技巧,do{}while(0)表达式会保证{}中的代码片段执行一次,保证宏展开时这个代码片段是一个整体。
带native_前缀之类的函数则跟我们之前实现的hal_前缀对应,而Linux为了支持不同的硬件平台,做了多层封装。
Linux自旋锁
Linux也是支持多核心CPU的操作系统内核,因此Linux也需要自旋锁来对系统中的共享资源进行保护。同一时刻,只有获取了锁的进程才能使用共享资源。
根据上节课对自旋锁算法的理解,自旋锁不会引起加锁进程睡眠,如果自旋锁已经被别的进程持有,加锁进程就需要一直循环在那里,查看是否该自旋锁的持有者已经释放了锁,”自旋”一词就是因此而得名。
Linux有多种自旋锁,我们这里只介绍两种,原始自旋锁和排队自旋锁,它们底层原理和我们之前实现的没什么不同,但多了一些优化和改进,下面我们一起去看看。
Linux原始自旋锁
我们先看看Linux原始的自旋锁,Linux的原始自旋锁本质上用一个整数来表示,值为1代表锁未被占用,为0或者负数则表示被占用。
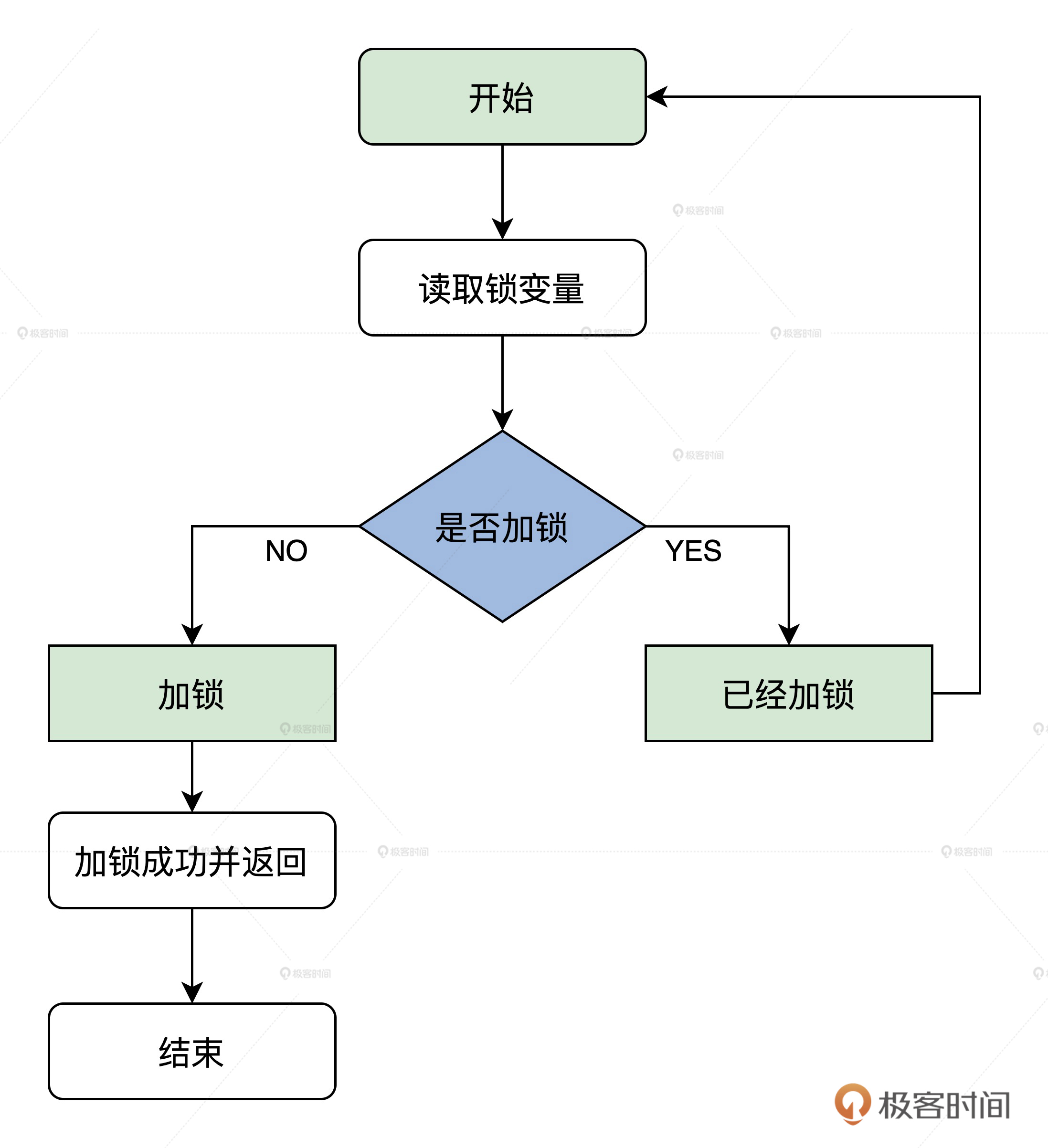
你可以结合上节课的这张图,理解后面的内容。当某个CPU核心执行进程请求加锁时,如果锁是未加锁状态,则加锁,然后操作共享资源,最后释放锁;如果锁已被加锁,则进程并不会转入睡眠状态,而是循环等待该锁,一旦锁被释放,则第一个感知此信息的进程将获得锁。
我们先来看看Linux原始自旋锁的数据结构,为方便你阅读,我删除了用于调试的数据字段,代码如下。 //最底层的自旋锁数据结构 typedef struct{ volatile unsigned long lock;//真正的锁值变量,用volatile标识 }spinlock_t;
Linux原始自旋锁数据结构封装了一个unsigned long类型的变量。有了数据结构,我们再来看看操作这个数据结构的函数,即自旋锁接口,代码如下。
/#define spin_unlock_string \ “movb $1,%0” \ //写入1表示解锁 :”=m” (lock->lock) : : “memory” /#define spin_lock_string \ “\n1:\t” \ “lock ; decb %0\n\t” \ //原子减1 “js 2f\n” \ //当结果小于0则跳转到标号2处,表示加锁失败 “.section .text.lock,"ax"\n” \ //重新定义一个代码段,这是优化技术,避免后面的代码填充cache,因为大部分情况会加锁成功,链接器会处理好这个代码段的 “2:\t” \ “cmpb $0,%0\n\t” \ //和0比较 “rep;nop\n\t” \ //空指令 “jle 2b\n\t” \ //小于或等于0跳转到标号2 “jmp 1b\n” \ //跳转到标号1 “.previous” //获取自旋锁 static inline void spin_lock(spinlock_t/lock){ asm volatile( spin_lock_string :”=m”(lock->lock)::”memory” ); } //释放自旋锁 static inline void spin_unlock(spinlock_t/lock){ asm volatile( spin_unlock_string ); }
上述代码中用spin_lock_string、spin_unlock_string两个宏,定义了获取、释放自旋锁的汇编指令。spin_unlock_string只是简单将锁值变量设置成1,表示释放自旋锁,spin_lock_string中并没有像我们Cosmos一样使用xchg指令,而是使用了decb指令,这条指令也能原子地执行减1操作。
开始锁值变量为1时,执行decb指令就变成了0,0就表示加锁成功。如果小于0,则表示有其它进程已经加锁了,就会导致循环比较。
Linux排队自旋锁
现在我们再来看看100个进程获取同一个自旋锁的情况,开始1个进程获取了自旋锁L,后面继续来了99个进程,它们都要获取自旋锁L,但是它们必须等待,这时第1进程释放了自旋锁L。请问,这99个进程中谁能先获取自旋锁L呢?
答案是不确定,因为这个次序依赖于哪个CPU核心能最先访问内存,而哪个CPU核心可以访问内存是由总线仲裁协议决定的。
很有可能最后来的进程最先获取自旋锁L,这对其它等待的进程极其不公平,为了解决获取自旋锁的公平性,Linux开发出了排队自旋锁。
你可以这样理解,想要给进程排好队,就需要确定顺序,也就是进程申请获取锁的先后次序,Linux的排队自旋锁通过保存这个信息,就能更公平地调度进程了。
为了保存顺序信息,排队自旋锁重新定义了数据结构。 //RAW层的自旋锁数据结构 typedef struct raw_spinlock{ unsigned int slock;//真正的锁值变量 }raw_spinlock_t; //最上层的自旋锁数据结构 typedef struct spinlock{ struct raw_spinlock rlock; }spinlock_t; //Linux没有这样的结构,这只是为了描述方便 typedef struct raw_spinlock{ union { unsigned int slock;//真正的锁值变量 struct { u16 owner; u16 next; } } }raw_spinlock_t;
slock域被分成两部分,分别保存锁持有者和未来锁申请者的序号,如上述代码10~16行所示。
只有next域与owner域相等时,才表示自旋锁处于未使用的状态(此时也没有进程申请该锁)。在排队自旋锁初始化时,slock被置为0,即next和owner被置为0,Linux进程执行申请自旋锁时,原子地将next域加1,并将原值返回作为自己的序号。
如果返回的序号等于申请时的owner值,说明自旋锁处于未使用的状态,则进程直接获得锁;否则,该进程循环检查owner域是否等于自己持有的序号,一旦相等,则表明锁轮到自己获取。
进程释放自旋锁时,原子地将owner域加1即可,下一个进程将会发现这一变化,从循环状态中退出。进程将严格地按照申请顺序依次获取排队自旋锁。这样一来,原先进程无序竞争的乱象就迎刃而解了。 static inline void raw_spin_lock(raw_spinlock_t/lock){ int inc = 0x00010000; int tmp; __asm__ __volatile__( “lock ; xaddl %0, %1\n” //将inc和slock交换,然后 inc=inc+slock //相当于原子读取next和owner并对next+1 “movzwl %w0, %2\n\t”//将inc的低16位做0扩展后送tmp tmp=(u16)inc “shrl $16, %0\n\t” //将inc右移16位 inc=inc»16 “1:\t” “cmpl %0, %2\n\t” //比较inc和tmp,即比较next和owner “je 2f\n\t” //相等则跳转到标号2处返回 “rep ; nop\n\t” //空指令 “movzwl %1, %2\n\t” //将slock的低16位做0扩展后送tmp 即tmp=owner “jmp 1b\n” //跳转到标号1处继续比较 “2:” :”+Q”(inc),”+m”(lock->slock),”=r”(tmp) ::”memory”,”cc” ); } /#define UNLOCK_LOCK_PREFIX LOCK_PREFIX static inline void __raw_spin_unlock(raw_spinlock_t/lock){ __asm volatile( UNLOCK_LOCK_PREFIX”incw %0”//将slock的低16位加1 即owner+1 :”+m”(lock->slock) ::”memory”,”cc”); }
上述代码中的注释已经描述得很清楚了,每条指令都有注解,供你参考。这里需要注意的是Linux为了避免差异性,在spinlock_t结构体中包含了raw_spinlock_t,而在raw_spinlock_t结构体中并没使用next和owner字段,而是在代码中直接操作slock的高16位和低16位来实现的。
不知道你有没有过这样的经历?当你去银行办事,又发现人很多时,你很可能会选择先去处理一些别的事情,等过一会人比较少了,再来办理我们自己的业务。
其实,在使用自旋锁时也有同样的情况,当一个进程发现另一个进程已经拥有自己所请求的自旋锁时,就自愿放弃,转而做其它别的工作,并不想在这里循环等待,浪费自己的时间。
对于这种情况,Linux同样提供了相应的自旋锁接口,如下所示。 static inline int _raw_spin_trylock(raw_spinlock_t/*lock){ int tmp; int new; asm volatile( “movl %2,%0\n\t”//tmp=slock “movl %0,%1\n\t”//new=tmp “roll $16, %0\n\t”//tmp循环左移16位,即next和owner交换了 “cmpl %0,%1\n\t”//比较tmp和new即(owner、next)?=(next、owner) “jne 1f\n\t” //不等则跳转到标号1处 “addl $0x00010000, %1\n\t”//相当于next+1 “lock ; cmpxchgl %1,%2\n\t”//new和slock交换比较 “1:” “sete %b1\n\t” //new = eflags.ZF位,ZF取决于前面的判断是否相等 “movzbl %b1,%0\n\t” //tmp = new :”=&a”(tmp),”=Q”(new),”+m”(lock->slock) ::”memory”,”cc”); return tmp; } int __lockfunc _spin_trylock(spinlock_t/*lock){ preempt_disable(); if(_raw_spin_trylock(lock)){ spin_acquire(&lock->dep_map,0,1,_RET_IP); return 1; } preempt_enable(); return 0; } /#define spin_trylock(lock) __cond_lock(lock, _spin_trylock(lock))
_cond_lock只用代码静态检查工作,一定要明白_spin_trylock返回1表示尝试加锁成功,可以安全的地问共享资源了;返回值为0则表示尝试加锁失败,不能操作共享资源,应该等一段时间,再次尝试加锁。
Linux信号量
Linux中的信号量同样是用来保护共享资源,能保证资源在一个时刻只有一个进程使用,这是单值信号量。也可以作为资源计数器,比如一种资源有五份,同时最多可以有五个进程,这是多值信号量。
单值信号量,类比于私人空间一次只进去一个人,其信号量的值初始值为1,而多值信号量,相当于是客厅,可同时容纳多个人。其信号量的值初始值为5,就可容纳5个人。
信号量的值为正的时候。所申请的进程可以锁定使用它。若为0,说明它被其它进程占用,申请的进程要进入睡眠队列中,等待被唤醒。所以信号量最大的优势是既可以使申请失败的进程睡眠,还可以作为资源计数器使用。
我们先来看看Linux实现信号量所使用的数据结构,如下所示: struct semaphore{ raw_spinlock_t lock;//保护信号量自身的自旋锁 unsigned int count;//信号量值 struct list_head wait_list;//挂载睡眠等待进程的链表 };
下面我们就跟着Linux信号量接口函数,一步步探索Linux信号量工作原理,和它对进程状态的影响,先来看看Linux信号量的使用案例,如下所示。
/#define down_console_sem() do { \ down(&console_sem);\ } while (0) static void _up_console_sem(unsigned long ip) { up(&console_sem); } /#define up_console_sem() __up_console_sem(_RET_IP) //加锁console void console_lock(void) { might_sleep(); down_console_sem();//获取信号量console_sem if (console_suspended) return; console_locked = 1; console_may_schedule = 1; } //解锁console void console_unlock(void) { static char ext_text[CONSOLE_EXT_LOG_MAX]; static char text[LOG_LINE_MAX + PREFIX_MAX]; //……删除了很多代码 up_console_sem();//释放信号量console_sem raw_spin_lock(&logbuf_lock); //……删除了很多代码 }
为了简单说明问题,我删除了很多代码,上面代码中以console驱动为例说明了信号量的使用。
在Linux源代码的kernel/printk.c中,使用宏DEFINE_SEMAPHORE声明了一个单值信号量console_sem,也可以说是互斥锁,它用于保护console驱动列表console_drivers以及同步对整个console驱动的访问。
其中定义了宏down_console_sem()来获得信号量console_sem,定义了宏up_console_sem()来释放信号量console_sem,console_lock和console_unlock函数是用于互斥访问console驱动的,核心操作就是调用前面定义两个宏。
上面的情景中,down_console_sem()和up_console_sem()宏的核心主要是调用了信号量的接口函数down、up函数,完成获取、释放信号量的核心操作,代码如下。 static inline int __sched __down_common(struct semaphore /sem, long state,long timeout) { struct semaphore_waiter waiter; //把waiter加入sem->wait_list的头部 list_add_tail(&waiter.list, &sem->wait_list); waiter.task = current;//current表示当前进程,即调用该函数的进程 waiter.up = false; for (;;) { if (signal_pending_state(state, current)) goto interrupted; if (unlikely(timeout <= 0)) goto timed_out; __set_current_state(state);//设置当前进程的状态,进程睡眠,即先前__down函数中传入的TASK_UNINTERRUPTIBLE:该状态是等待资源有效时唤醒(比如等待键盘输入、socket连接、信号(signal)等等),但不可以被中断唤醒 raw_spin_unlock_irq(&sem->lock);//释放在down函数中加的锁 timeout = schedule_timeout(timeout);//真正进入睡眠 raw_spin_lock_irq(&sem->lock);//进程下次运行会回到这里,所以要加锁 if (waiter.up) return 0; } timed_out: list_del(&waiter.list); return -ETIME; interrupted: list_del(&waiter.list); return -EINTR; //为了简单起见处理进程信号(signal)和超时的逻辑代码我已经删除 } //进入睡眠等待 static noinline void __sched __down(struct semaphore /sem) { __down_common(sem, TASK_UNINTERRUPTIBLE, MAX_SCHEDULE_TIMEOUT); } //获取信号量 void down(struct semaphore /sem) { unsigned long flags; //对信号量本身加锁并关中断,也许另一段代码也在操作该信号量 raw_spin_lock_irqsave(&sem->lock, flags); if (likely(sem->count > 0)) sem->count–;//如果信号量值大于0,则对其减1 else __down(sem);//否则让当前进程进入睡眠 raw_spin_unlock_irqrestore(&sem->lock, flags); } //实际唤醒进程 static noinline void __sched __up(struct semaphore /sem) { struct semaphore_waiter /waiter = list_first_entry(&sem->wait_list, struct semaphore_waiter, list); //获取信号量等待链表中的第一个数据结构semaphore_waiter,它里面保存着睡眠进程的指针 list_del(&waiter->list); waiter->up = true; wake_up_process(waiter->task);//唤醒进程重新加入调度队列 } //释放信号量 void up(struct semaphore /sem) { unsigned long flags; //对信号量本身加锁并关中断,必须另一段代码也在操作该信号量 raw_spin_lock_irqsave(&sem->lock, flags); if (likely(list_empty(&sem->wait_list))) sem->count++;//如果信号量等待链表中为空,则对信号量值加1 else __up(sem);//否则执行唤醒进程相关的操作 raw_spin_unlock_irqrestore(&sem->lock, flags); }
上述代码中的逻辑,已经描述了信号量的工作原理。需要注意的是,一个进程进入了__down函数中,设置了一个不可中断的等待状态,然后执行了schedule_timeout函数。这个执行了进程的调度器,就直接调度到别的进程运行了。
这时,这个进程就不会返回了,直到下一次它被up函数唤醒。执行了wake_up_process函数以后,重新调度它就会回到schedule_timeout函数下一行代码,沿着调用路经返回,最后从__down函数中出来,即进程睡醒了。
Linux读写锁
在操作系统中,有很多共享数据,进程对这些共享数据要进行修改的情况很少,而读取的情况却是非常多的,这些共享数据的操作基本都是在读取。
如果每次读取这些共享数据都加锁的话,那就太浪费时间了,会降低进程的运行效率。因为读操作不会导致修改数据,所以在读取数据的时候不用加锁了,而是可以共享的访问,只有涉及到对共享数据修改的时候,才需要加锁互斥访问。
想像一下100个进程同时读取一个共享数据,而每个进程都要加锁解锁,剩下的进程只能等待,这会大大降低整个系统性能,这时候就需要使用一种新的锁了——读写锁。
读写锁也称为共享-独占(shared-exclusive)锁,当读写锁用读取模式加锁时,它是以共享模式上锁的,当以写入修改模式加锁时,它是以独占模式上锁的(互斥)。
读写锁非常适合读取数据的频率远大于修改数据的频率的场景中。这样可以在任何时刻,保证多个进程的读取操作并发地执行,给系统带来了更高的并发度。
那读写锁是怎么工作的呢?读写之间是互斥的,读取的时候不能写入,写入的时候不能读取,而且读取和写入操作在竞争锁的时候,写会优先得到锁,步骤如下。
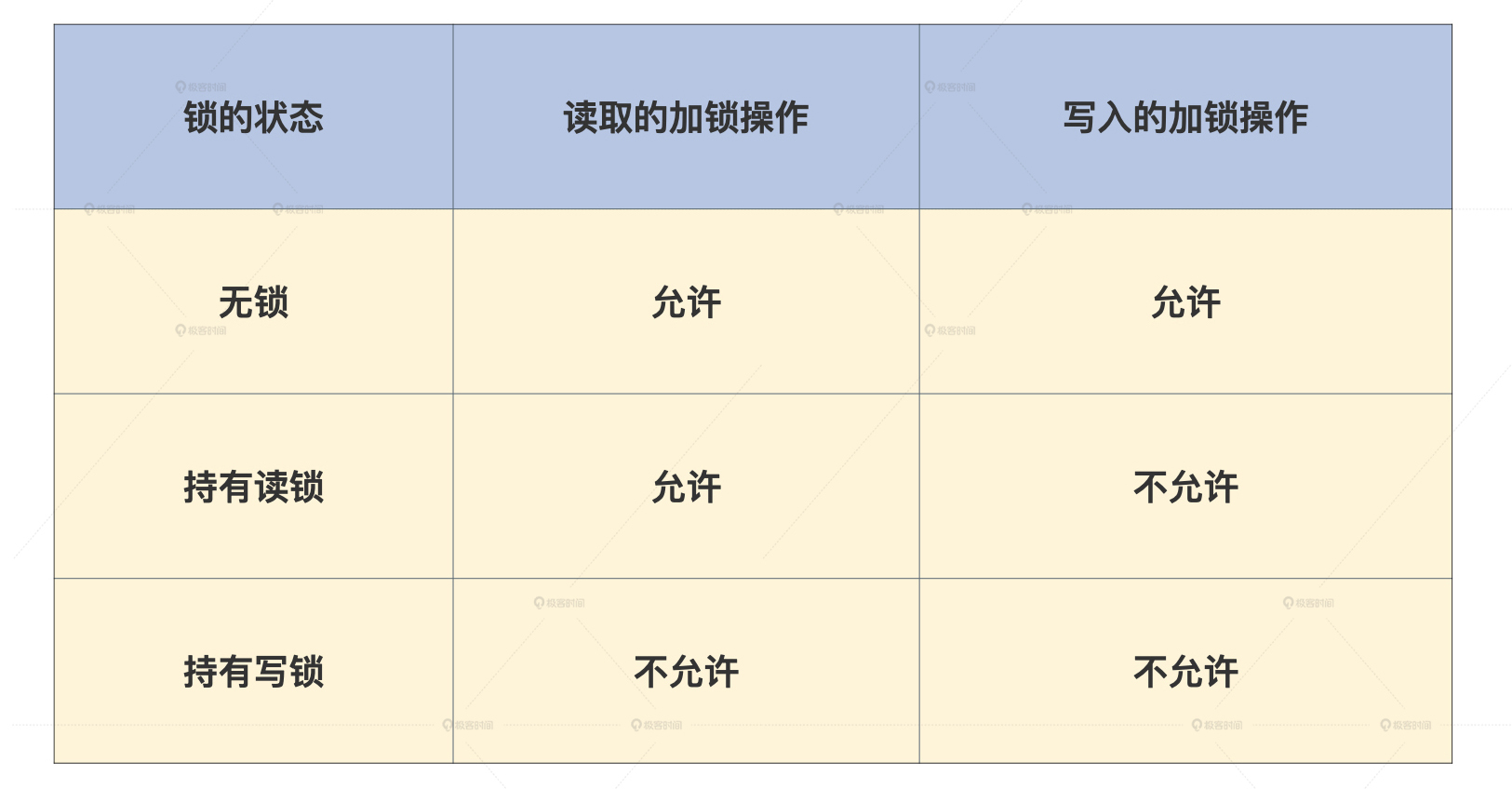
1.当共享数据没有锁的时候,读取的加锁操作和写入的加锁操作都可以满足。- 2.当共享数据有读锁的时候,所有的读取加锁操作都可以满足,写入的加锁操作不能满足,读写是互斥的。- 3.当共享数据有写锁的时候,所有的读取的加锁操作都不能满足,所有的写入的加锁操作也不能满足,读与写之间是互斥的,写与写之间也是互斥的。
如果你感觉刚才说的步骤还是太复杂,那我再给你画一个表,你就清楚了,如下所示。
好了,我们明白了读写锁的加锁规则,现在就去看看Linux中的读写锁的实现,Linux中的读写锁本质上是自旋锁的变种。
后面这段代码是Linux中读写锁的核心代码,请你注意,实际操作的时候,我们不是直接使用上面的函数和数据结构,而是应该使用Linux提供的标准接口,如read_lock、write_lock等。 //读写锁初始化锁值 /#define RW_LOCK_BIAS 0x01000000 //读写锁的底层数据结构 typedef struct{ unsigned int lock; }arch_rwlock_t; //释放读锁 static inline void arch_read_unlock(arch_rwlock_t/rw){ asm volatile( LOCK_PREFIX”incl %0” //原子对lock加1 :”+m”(rw->lock)::”memory”); } //释放写锁 static inline void arch_write_unlock(arch_rwlock_t/rw){ asm volatile( LOCK_PREFIX”addl %1, %0”//原子对lock加上RW_LOCK_BIAS :”+m”(rw->lock):”i”(RW_LOCK_BIAS):”memory”); } //获取写锁失败时调用 ENTRY(__write_lock_failed) //(%eax)表示由eax指向的内存空间是调用者传进来的 2:LOCK_PREFIX addl $ RW_LOCK_BIAS,(%eax) 1:rep;nop//空指令 cmpl $RW_LOCK_BIAS,(%eax) //不等于初始值则循环比较,相等则表示有进程释放了写锁 jne 1b //执行加写锁 LOCK_PREFIX subl $ RW_LOCK_BIAS,(%eax) jnz 2b //不为0则继续测试,为0则表示加写锁成功 ret //返回 ENDPROC(__write_lock_failed) //获取读锁失败时调用 ENTRY(__read_lock_failed) //(%eax)表示由eax指向的内存空间是调用者传进来的 2:LOCK_PREFIX incl(%eax)//原子加1 1: rep; nop//空指令 cmpl $1,(%eax) //和1比较 小于0则 js 1b //为负则继续循环比较 LOCK_PREFIX decl(%eax) //加读锁 js 2b //为负则继续加1并比较,否则返回 ret //返回 ENDPROC(__read_lock_failed) //获取读锁 static inline void arch_read_lock(arch_rwlock_t/rw){ asm volatile( LOCK_PREFIX” subl $1,(%0)\n\t”//原子对lock减1 “jns 1f\n”//不为小于0则跳转标号1处,表示获取读锁成功 “call __read_lock_failed\n\t”//调用__read_lock_failed “1:\n” ::LOCK_PTR_REG(rw):”memory”); } //获取写锁 static inline void arch_write_lock(arch_rwlock_t/rw){ asm volatile( LOCK_PREFIX”subl %1,(%0)\n\t”//原子对lock减去RW_LOCK_BIAS “jz 1f\n”//为0则跳转标号1处 “call __write_lock_failed\n\t”//调用__write_lock_failed “1:\n” ::LOCK_PTR_REG(rw),”i”(RW_LOCK_BIAS):”memory”); }
Linux读写锁的原理本质是基于计数器,初始值为0x01000000,获取读锁时对其减1,结果不小于0则表示获取读锁成功,获取写锁时直接减去0x01000000。
说到这里你可能要问了,为何要减去初始值呢?这是因为只有当锁值为初始值时,减去初始值结果才可以是0,这是唯一没有进程持有任何锁的情况,这样才能保证获取写锁时是互斥的。
__read_lock_failed、__write_lock_failed是两个汇编函数,注释写得很详细了,和前面自旋锁的套路是一样的。我们可以看出,读写锁其实是带计数的特殊自旋锁,能同时被多个读取数据的进程占有或一个修改数据的进程占有,但不能同时被读取数据的进程和修改数据的进程占有。
我们再次梳理一下获取、释放读写锁的流程,如下所示。
1.获取读锁时,锁值变量lock计数减去1,判断结果的符号位是否为1。若结果符号位为0时,获取读锁成功,即表示lock大于0。- 2.获取读锁时,锁值变量lock计数减去1,判断结果的符号位是否为1。若结果符号位为1时,获取读锁失败,表示此时读写锁被修改数据的进程占有,此时调用__read_lock_failed失败处理函数,循环测试lock+1的值,直到结果的值大于等于1。- 3.获取写锁时,锁值变量lock计数减去RW_LOCK_BIAS_STR,即lock-0x01000000,判断结果是否为0。若结果为0时,表示获取写锁成功。- 4.获取写锁时,锁值变量lock计数减去RW_LOCK_BIAS_STR,即lock-0x01000000,判断结果是否为0。若结果不为0时,获取写锁失败,表示此时有读取数据的进程占有读锁或有修改数据的进程占有写锁,此时调用__write_lock_failed失败处理函数,循环测试lock+0x01000000,直到结果的值等于0x01000000。
重点回顾
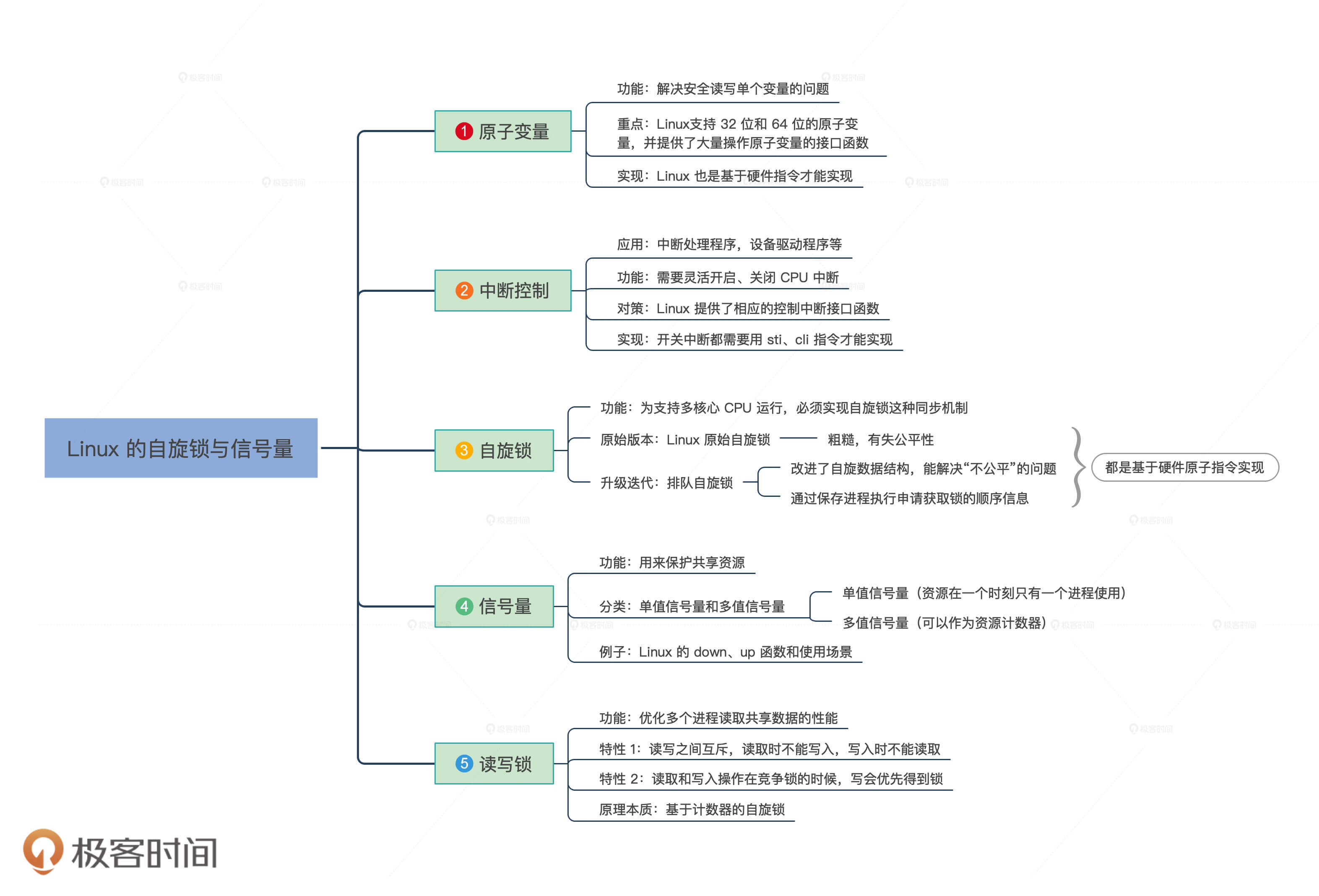
好了,这节课的内容讲完了。我们一起学习了Linux上实现数据同步的五大利器,分别是Linux原子变量、Linux中断控制、Linux自旋锁、Linux信号量、Linux读写锁。我把重点给你梳理一下。
锁,保证了数据的安全访问,但是它给程序的并行性能造成了巨大损害,所以在设计一个算法时应尽量避免使用锁。若无法避免,则应根据实际情况使用相应类型的锁,以降低锁的不当使用带来的性能损失。
思考题
请试着回答:上述Linux的读写锁,支持多少个进程并发读取共享数据?这样的读写锁有什么不足?
欢迎你在留言区和我交流,相信通过积极参与,你将更好地理解这节课的内容。
我是 LMOS,我们下节课见!
参考资料
https://learn.lianglianglee.com/%e4%b8%93%e6%a0%8f/%e6%93%8d%e4%bd%9c%e7%b3%bb%e7%bb%9f%e5%ae%9e%e6%88%9845%e8%ae%b2/09%20%e7%9e%a7%e4%b8%80%e7%9e%a7Linux%ef%bc%9aLinux%e7%9a%84%e8%87%aa%e6%97%8b%e9%94%81%e5%92%8c%e4%bf%a1%e5%8f%b7%e9%87%8f%e5%a6%82%e4%bd%95%e5%ae%9e%e7%8e%b0%ef%bc%9f.md
更多学习
更多实时资讯,前沿技术,生活趣事。尽在【老马啸西风】
交流社群:[交流群信息](https://mp.weixin.qq.com/s/rkSvXxiiLGjl3S-ZOZCr0Q)
