29 应用间通信(一):详解Linux进程IPC 你好,我是LMOS。
通过前面的学习,我们对进程有了一定的认知,进程之间是独立的、隔离的,这种安排,使得应用程序之间绝对不可以互相“侵犯”各自的领地。
但是,应用程序之间有时需要互相通信,互相协作,才能完成相关的功能。这就不得不由操作系统介入,实现一种通信机制。在这种通信机制的监管之下,让应用程序之间实现通信。Linux实现了诸如管道、信号、消息队列、共享内存,这就是Linux进程IPC。我们用两节课的时间,分别讨论这些通信机制。这节课,我们先学习管道和信号。
课程的配套代码,你可以从这里下载。
管道
顾名思义,通常管道就是你家一端连接着水池,另一端连着水龙头的、能流通水的东西。在Linux中管道作为最古老的通信方式,它能把一个进程产生的数据输送到另一个进程。
| 比方说,我们在shell中输入“ls -al / | wc -l”命令来统计根目录下有多少文件和目录。该命令中的“ | ”就是让shell创建ls进程后建立一个管道,连接到wc进程,使用ls的输出经由管道输入给wc。由于ls输出的是文本行,一个目录或者一个文件就占用一行,wc通过统计文本行数就能知道有多少目录和文件。 |
下面我们手动建立一个管道,代码如下所示: int main() { pid_t pid; int rets; int fd[2]; char r_buf[1024] = {0}; char w_buf[1024] = {0}; // 把字符串格式化写入w_buf数组中 sprintf(w_buf, “这是父进程 id = %d\n”, getpid()); // 建立管道 if(pipe(fd) < 0) { perror(“建立管道失败\n”); } // 建立子进程 pid = fork(); if(pid > 0) { // 写入管道 write(fd[1], w_buf, strlen(w_buf)); // 等待子进程退出 wait(&rets); } else if(pid == 0) { // 新进程 printf(“这是子进程 id = %d\n”, getpid()); // 读取管道 read(fd[0], r_buf, strlen(w_buf)); printf(“管道输出:%s\n”, r_buf); } return 0; }
上面的代码是一份代码,两个进程,父进程经过fork产生了子进程,子进程从25行代码开始运行。其中非常重要的是调用pipe函数,作用是建立一个管道。函数参数fd是文件句柄数组,其中fd[0]的句柄表示读端,而fd[1]句柄表示写端。- 我们立马来测试一下,如下图所示:
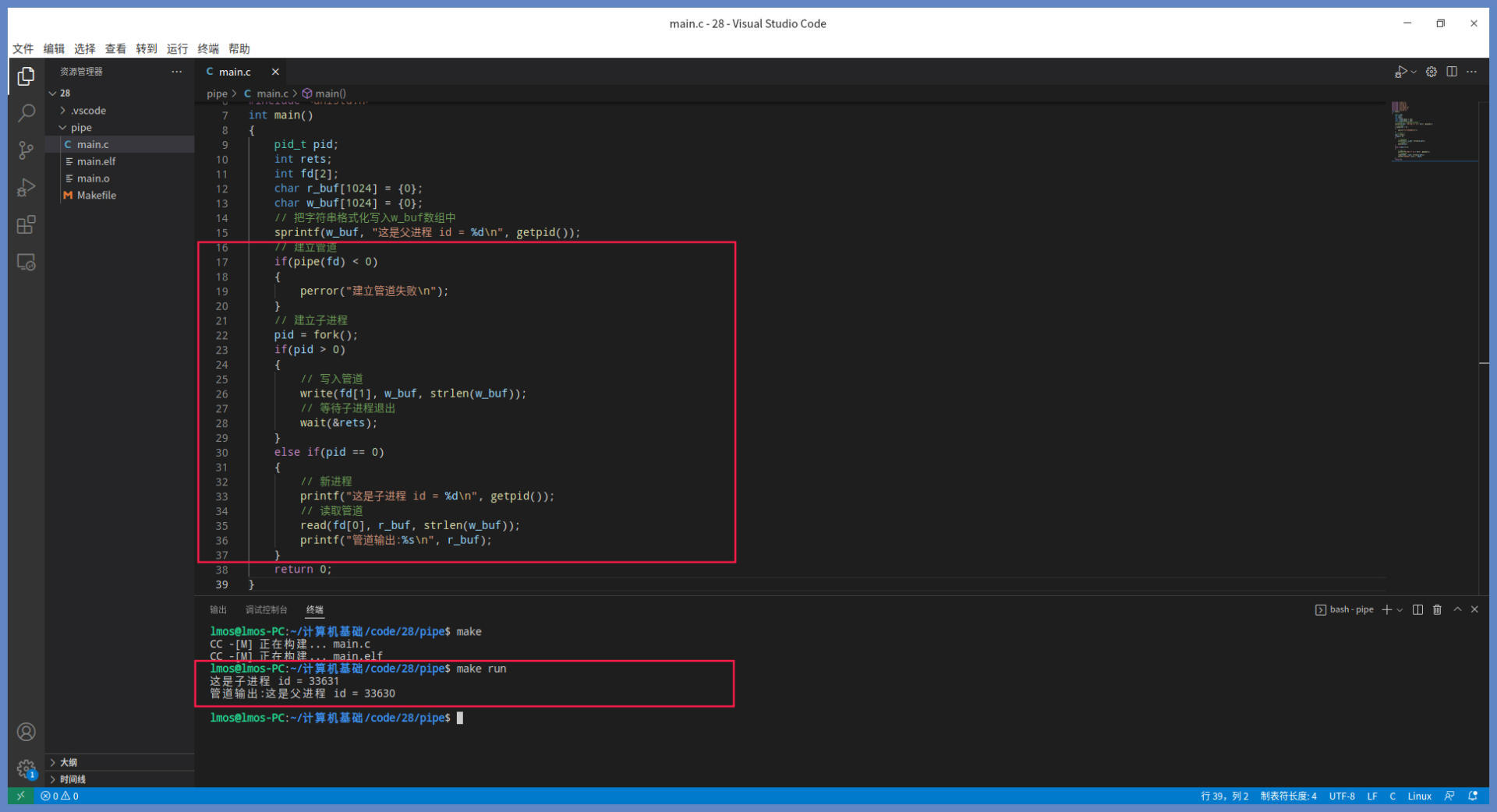
上图中,子进程通过管道获取了父进程写入的信息,可是为什么我们通过pipe和fork可以很轻松地在父子进程之间建立管道呢?
如果你把管道想象成一个只存在于内存中的、共享的特殊文件,就很好理解了。不过你要注意,该文件有两个文件描述符,一个是专用于读,一个专用于写。我再给你画一幅图帮你梳理逻辑,如下所示:
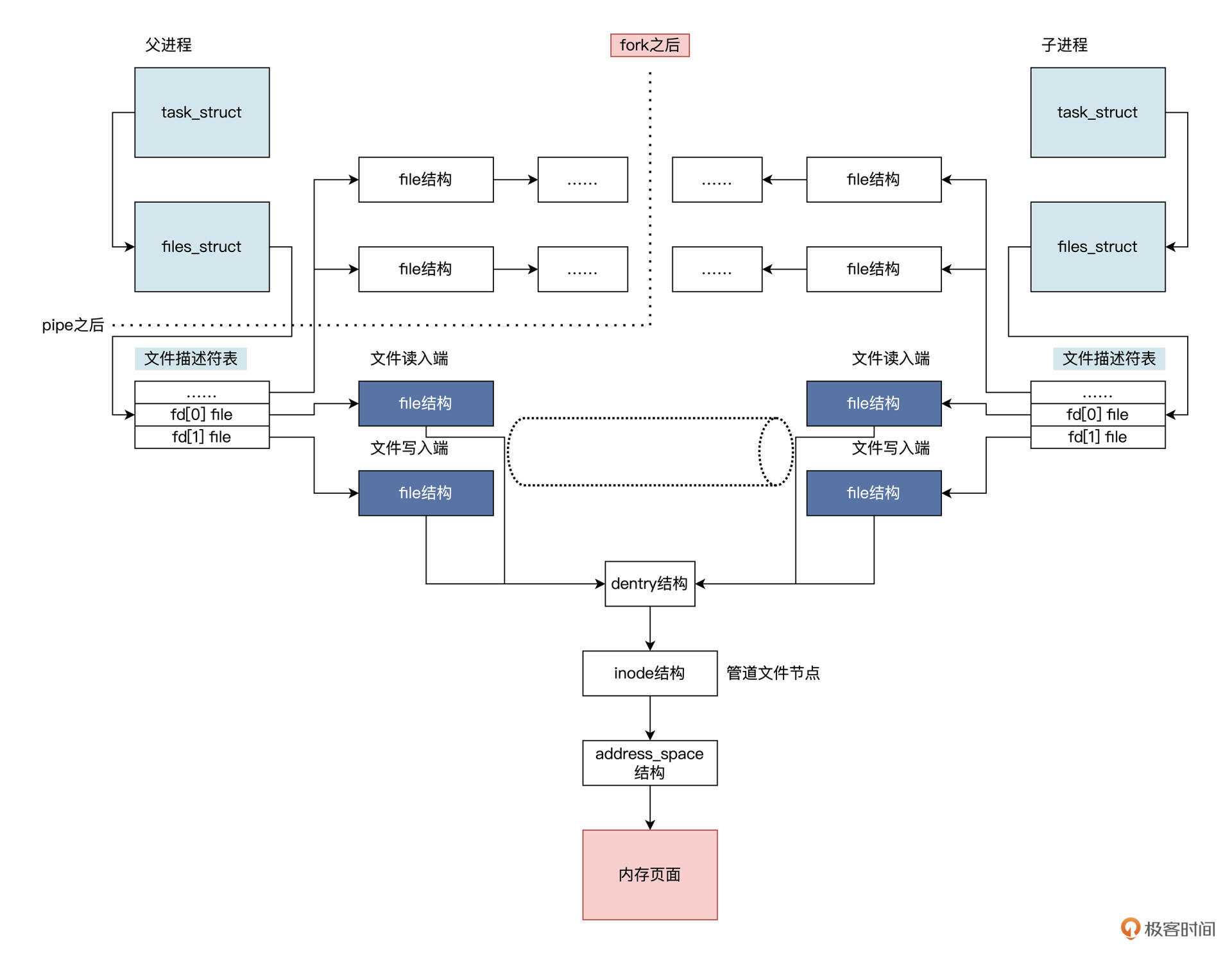
上图中pipe函数会使Linux在父进程中建立一个文件和两个file结构,分别用于读取和写入。调用fork之后,由于复制了父进程的数据结构,所以子进程也具备了这两个file结构,并且都指向同一个inode结构。inode结构在Linux中代表一个文件,这个inode会分配一些内存页面来缓存数据。但对于管道文件来说,这些页面中的数据不会写入到磁盘。
这也是为什么在应用程序中管道是用文件句柄索引,并使用文件读写函数来读写管道,因为管道本质上就是一个内存中的文件。
和读写文件一样,读写管道也有相应的规则:当管道中没有数据可读时,进程调用read时会阻塞,即进程暂停执行,一直等到管道有数据写入为止;当管道中的数据被写满的时候,进程调用write时阻塞,直到有其它进程从管道中读走数据。
如果所有管道写入端对应的文件句柄被关闭,则进程调用read时将返回0;如果所有管道的读取端对应的文件句柄被关闭,则会调用write,从而产生SIGPIPE信号,这可能导致调用write进程退出。这些规则由Linux内核维护,应用开发人员不用操心。
如果要写入的数据量小于管道内部缓冲时,Linux内核将保证这次写入操作的原子性。但是当要写入的数据量大于管道内部缓冲时,Linux内核将不再保证此次写入操作的原子性,可能会分批次写入。
这些读写规则,都是基于管道读写端是阻塞状态下的情况,你可以调用fcntl调用,把管道的读写端设置非阻塞状态。这样调用write和read不满足条件时,将直接返回相应的错误码,而不是阻塞进程。
管道是一种非常简单的通信机制,由于数据在其中像水一样,从水管的一端流动到另一端,故而得名管道。注意,管道只能从一端流向另一端,不能同时对流。之所以说管道简单,正是因为它是一种基于两个进程间的共享内存文件实现的,可以继承文件操作的api接口,这也符合Linux系统一切皆文件的设计思想。
信号
Linux信号,也是种古老的进程间通信方式,不过,这里的信号我们不能按照字面意思来理解。Linux信号是一种异步事件通知机制,类似于计算机底层的硬件中断。
我举个生活化的例子来帮助你理解。比如我们最熟悉的闹钟,闹钟会在既定的时间提醒你“该起床啦”。闹钟发出声音,类似于产生信号,你因为闹钟声音被叫醒,然后关掉闹钟并起床,开始一天的美好生活,这就类似于处理信号。
简单来说,信号是Linux操作系统为进程设计的一种软件中断机制,用来通知进程发生了异步事件。事件来源可以是另一个进程,这使得进程与进程之间可以互相发送信号;事件来源也可以是Linux内核本身,因为某些内部事件而给进程发送信号,通知进程发生了某个事件。
从进程执行的行为来说,信号能打断进程当前正在运行的代码,转而执行另一段代码。信号来临的时间和信号会不会来临,对于进程而言是不可预知的,这说明了信号的异步特性。
下面我们就来小试牛刀,用定时器在既定的时间点产生信号,发送给当前运行的进程,使进程结束运行。代码如下所示: void handle_timer(int signum, siginfo_t /info, void /ucontext) { printf(“handle_timer 信号码:%d\n”, signum); printf(“进程:%d 退出!\n”, getpid()); // 正常退出进程 exit(0); return; } int main() { struct sigaction sig; // 设置信号处理回调函数 sig.sa_sigaction = handle_timer; sig.sa_flags = SA_SIGINFO; // 安装定时器信号 sigaction(SIGALRM, &sig, NULL); // 设置4秒后产生信号SIGALRM信号 alarm(4); while(1) { ;// 死循环防止进程退出 } return 0; }
上面的main函数中发生了很多事情,我们一步一步来梳理。- 第一步,main函数中通过sigaction结构设置相关信号,例如信号处理回调函数和一个信号标志。接着是第二步,安装信号,通过sigaction函数把信号信息传递给Linux内核,Linux内核会在这个进程上,根据信号信息安装好信号。
之后是第三步,产生信号,alarm函数会让Linux内核设置一个定时器,到了特定的时间点后,内核发现时间过期了就会给进程发出一个SIGALRM信号,由Linux内核查看该进程是否安装了信号处理函数,以及是否屏蔽了该信号。确定之后,Linux内核会保存进程当前上下文,然后构建一个执行信号处理函数的栈帧,让进程返回到信号处理函数运行。
我们来运行代码证明一下,如下图所示:
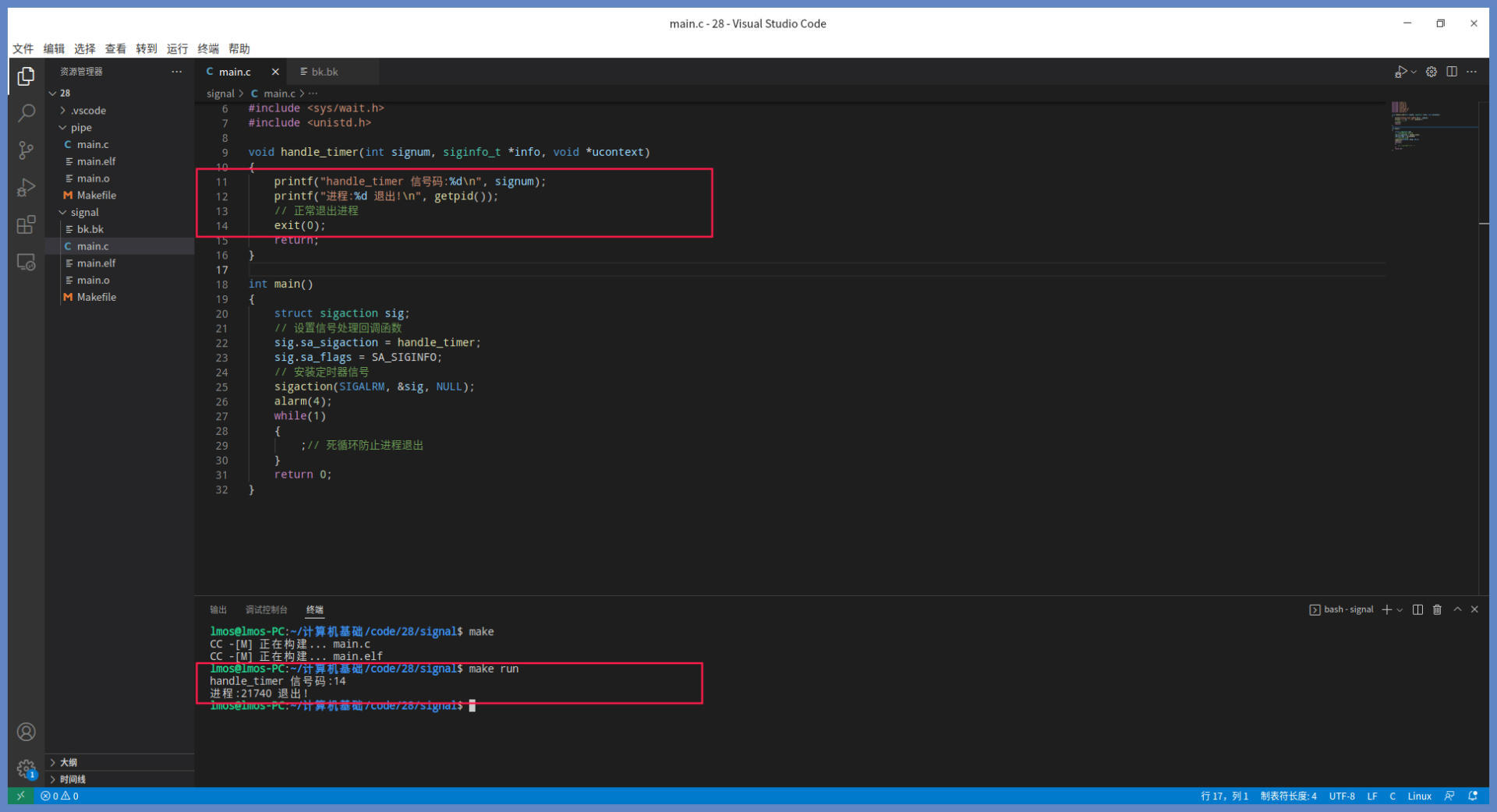
可以看到,程序运行起来等待4秒后,内核产生了SIGALRM信号,然后开始执行handle_timer函数。请注意,我们在main函数没有调用handle_timer函数,它是由内核异步调用的。在handle_timer函数中输出了信号码,然后就调用exit退出进程了。
信号码是什么呢?它就是一个整数,是一种信号的标识,代表某一种信号。SIGALRM定义为14。你可以用kill -l 命令查看Linux系统支持的全部信号。我把常用的一些信号列出来了,如下表所示:
 -
- 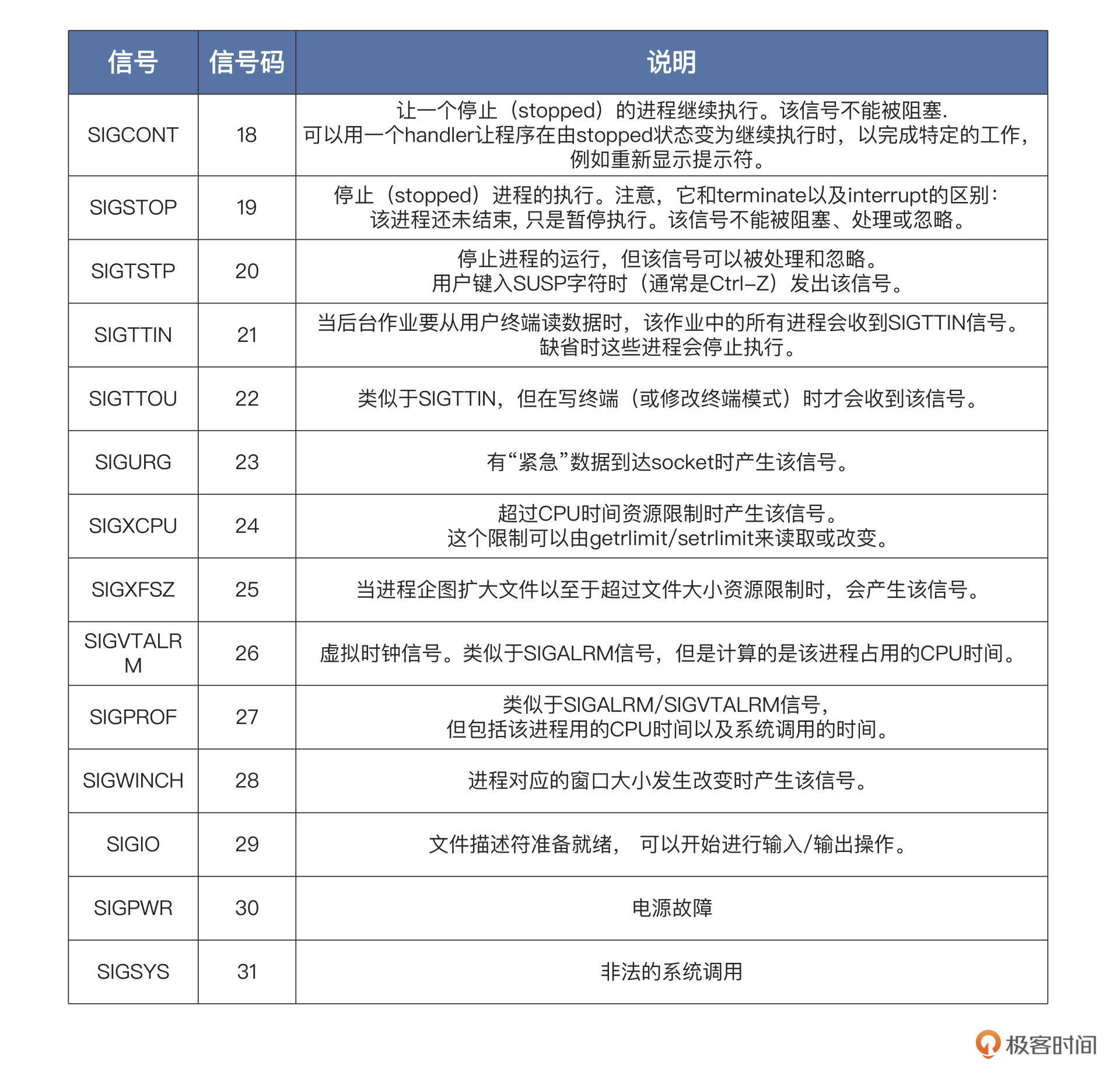
上面都是Linux的标准信号,它们大多数来源于键盘输入、硬件故障、系统调用、应用程序自身的非法运算。一旦信号产生了,进程就会有三种选择:忽略、捕捉、执行默认操作。其实大多数应用开发者都采用忽略信号或者执行信号默认动作,这是一种“信号来了,我不管”的姿态。
一般信号的默认动作就是忽略,有一些信号的默认动作可能是终止进程、终止进程并保存内存信息、停止进程、恢复进程,你可以自己对照上表,看看具体是哪些信号。还有一些信号,比如SIGKILL、SIGSTOP,它是不能由应用自己捕捉处理的,也不能被忽略,只能执行操作系统的默认操作。为什么要这么规定呢?
我们想一想,如果SIGKILL、SIGSTOP信号能被捕捉和忽略,那么超级用户和系统自己就没有可靠的手段使进程终止或停止了。
好,现在我们已经了解了信号的基本知识,知道了信号来源、如何发出信号、以及捕获处理信号。可是我们还不知道要如何给其它进程发送信号,以及如何在信号中传送信息。
下面我们就把前面那个“闹钟”程序升一下级。代码如下所示: static pid_t subid; void handle_sigusr1(int signum, siginfo_t /info, void /ucontext) { printf(“handle_sigusr1 信号码:%d\n”, signum); //判断是否有数据 if (ucontext != NULL) { //保存发送过来的信息 printf(“传递过来的子进程ID:%d\n”, info->si_int); printf(“发送信号的父进程ID:%d\n”, info->si_pid); // 接收数据 printf(“对比传递过来的子进程ID:%d == Getpid:%d\n”, info->si_value.sival_int, getpid()); } // 退出进程 exit(0); return; } int subprocmain() { struct sigaction sig; // 设置信号处理函数 sig.sa_sigaction = handle_sigusr1; sig.sa_flags = SA_SIGINFO; // 安装信号 sigaction(SIGUSR1, &sig, NULL); // 防止子进程退出 while (1) { pause(); // 进程输入睡眠,等待任一信号到来并唤醒进程 } return 0; } void handle_timer(int signum, siginfo_t /info, void /ucontext) { printf(“handle_timer 信号码:%d\n”, signum); union sigval value; // 发送数据,也可以发送指针 value.sival_int = subid; // 子进程的id // 调用sigqueue,向子进程发出SIGUSR1信号 sigqueue(value.sival_int, SIGUSR1, value); return; } int main() { pid_t pid; // 建立子进程 pid = fork(); if (pid > 0) { // 记录新建子进程的id subid = pid; struct sigaction sig; // 设置信号处理函数 sig.sa_sigaction = handle_timer; sig.sa_flags = SA_SIGINFO; // 安装信号 sigaction(SIGALRM, &sig, NULL); alarm(4);// 4秒后发出SIGALRM信号 while (1) { pause(); // 进程输入睡眠,等待任一信号到来并唤醒进程 } } else if (pid == 0) { // 新进程 subprocmain(); } return 0; }
上面的代码逻辑很简单:首先我们在主进程中调用fork建立一个子进程。接着子进程开始执行subprocmain函数,并在其中安装了SIGUSR1信号处理函数,让子进程进入睡眠。4秒钟后主进程产生了SIGALRM信号,并执行了其处理函数handle_timer,在该函数中调用sigqueue函数,向子进程发出SIGUSR1信号,同时传递了相关信息。最后,子进程执行handle_sigusr1函数处理了SIGUSR1信号,打印相应信息后退出。- 运行结果如下图所示:
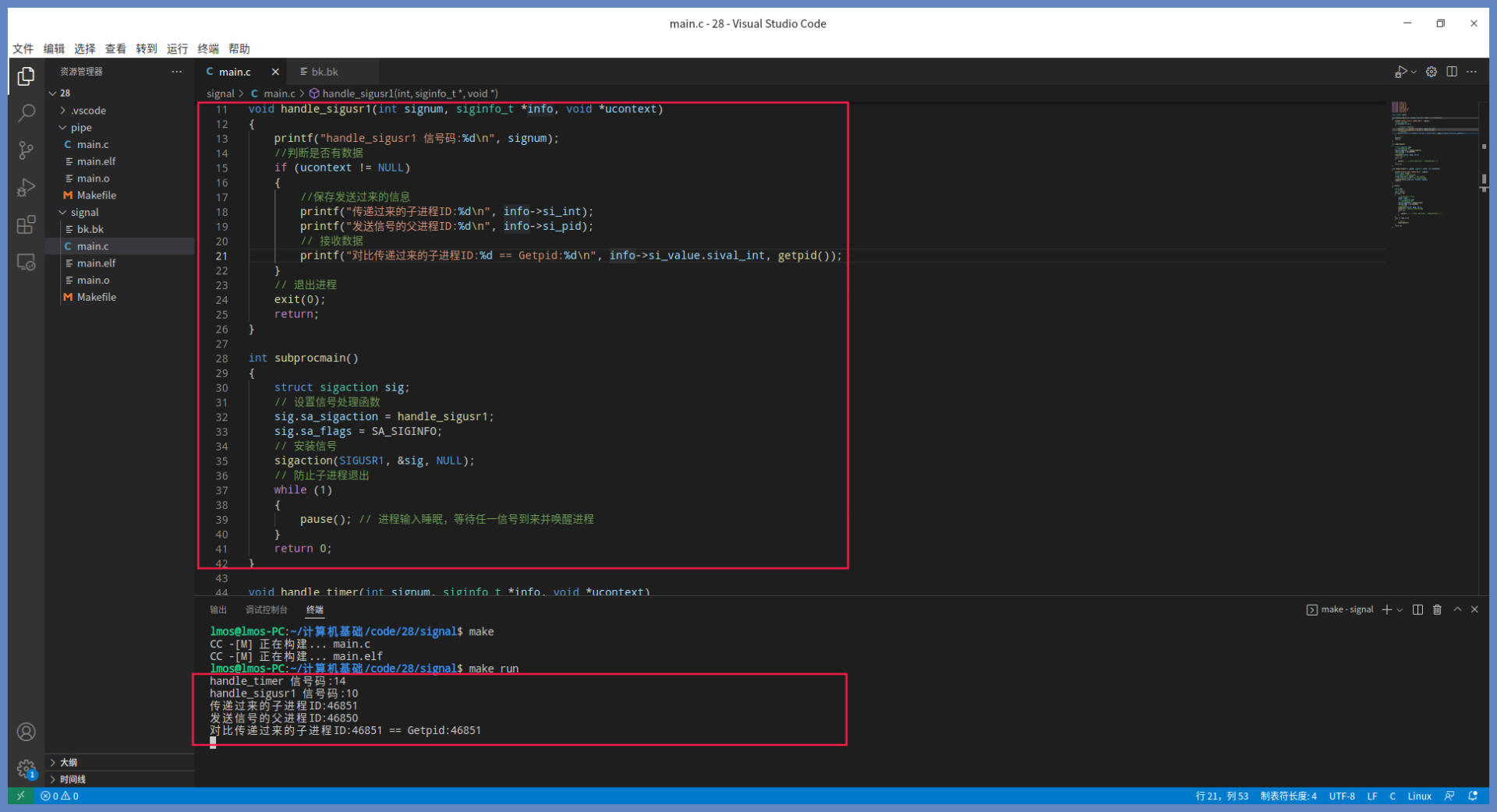
上图输出的结果,正确地展示了两个信号的处理过程:第一个SIGALRM信号是Linux内核中的定时器产生;而第二个SIGUSR1信号是我们调用sigqueue函数手动产生的。
sigqueue的函数原型如下所示: typedef union sigval { int sival_int; void /*sival_ptr; } sigval_t; // pid 发送信号给哪个进程,就是哪个进程id // sig 发送信号的信号码 // 附加value值(整数或指针) // 函数成功返回0,失败返回-1 int sigqueue(pid_t pid, int sig, const union sigval value);
到这里,我们就可以总结一下。信号是Linux内核基于一些特定的事件,并且这些事件要让进程感知到,从而实现的一种内核与进程之间、进程与进程之间的异步通信机制。
我们画一幅图来简单了解一下Linux内核对信号机制的实现,如下所示:
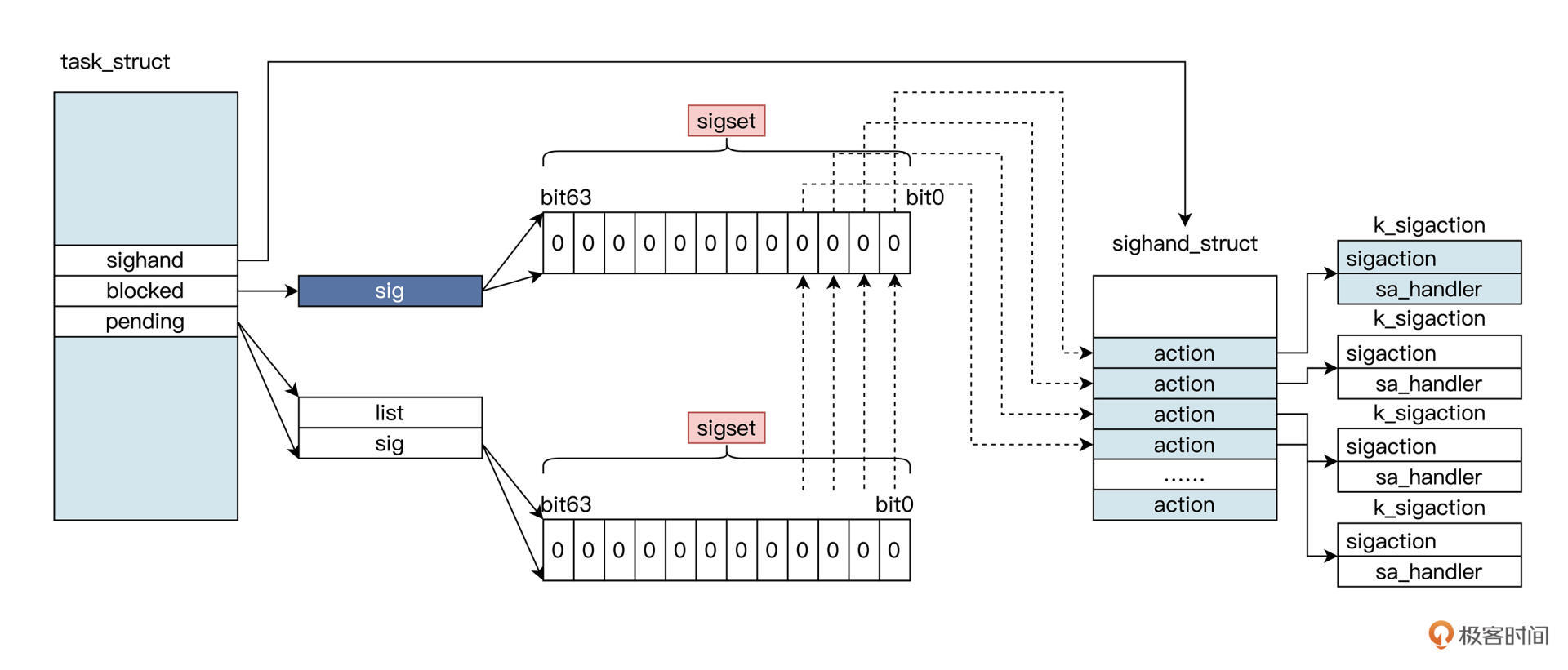
无论是硬件事件还是系统调用触发信号,都会演变成设置进程数据结构task_struct中pending对应的位。这其中每个位对应一个信号,设置了pending中的位还不够,我们还要看一看,blocked中对应的位是不是也被设置了。
如果blocked中对应的位也被设置了,就不能触发信号(这是给信号提供一种阻塞策略,对于有些信号没有用,如SIGKILL、SIGSTOP等);否则就会触发该位对应的action,根据其中的标志位查看是否捕获信号,进而调用其中sa_handler对应的函数。
那怎么判断信号最终是不是抵达了呢?这会表现为异步调用了进程某个函数。到这里,Linux提供的进程间异步通信——信号,我们就讲完了。
进程间的通信方法还有消息队列和共享内存,我们下节课再展开。
重点回顾
进程之间要协作,就要有进程间通信机制,Linux实现了多种通信机制,今天我们重点研究了管道和信号这两种机制。
| 管道能连接两个进程,一个进程的数据从管道的一端流向管道另一端的进程。如果管道空了则读进程休眠,管道满了则写进程休眠。这些同步手段由操作系统来完成,对用户是透明的。shell中常使用“ | ”在两个进程之间建立管道,让一个进程的输出数据,成为另一个进程的输入数据。 |
除了管道,信号也是Linux下经典的通信方式。信号比较特殊,它总是异步地打断进程,使得正在运行的进程转而去处理信号。信号来源硬件、系统,和其它进程。发送信号时,也能携带一些数据。
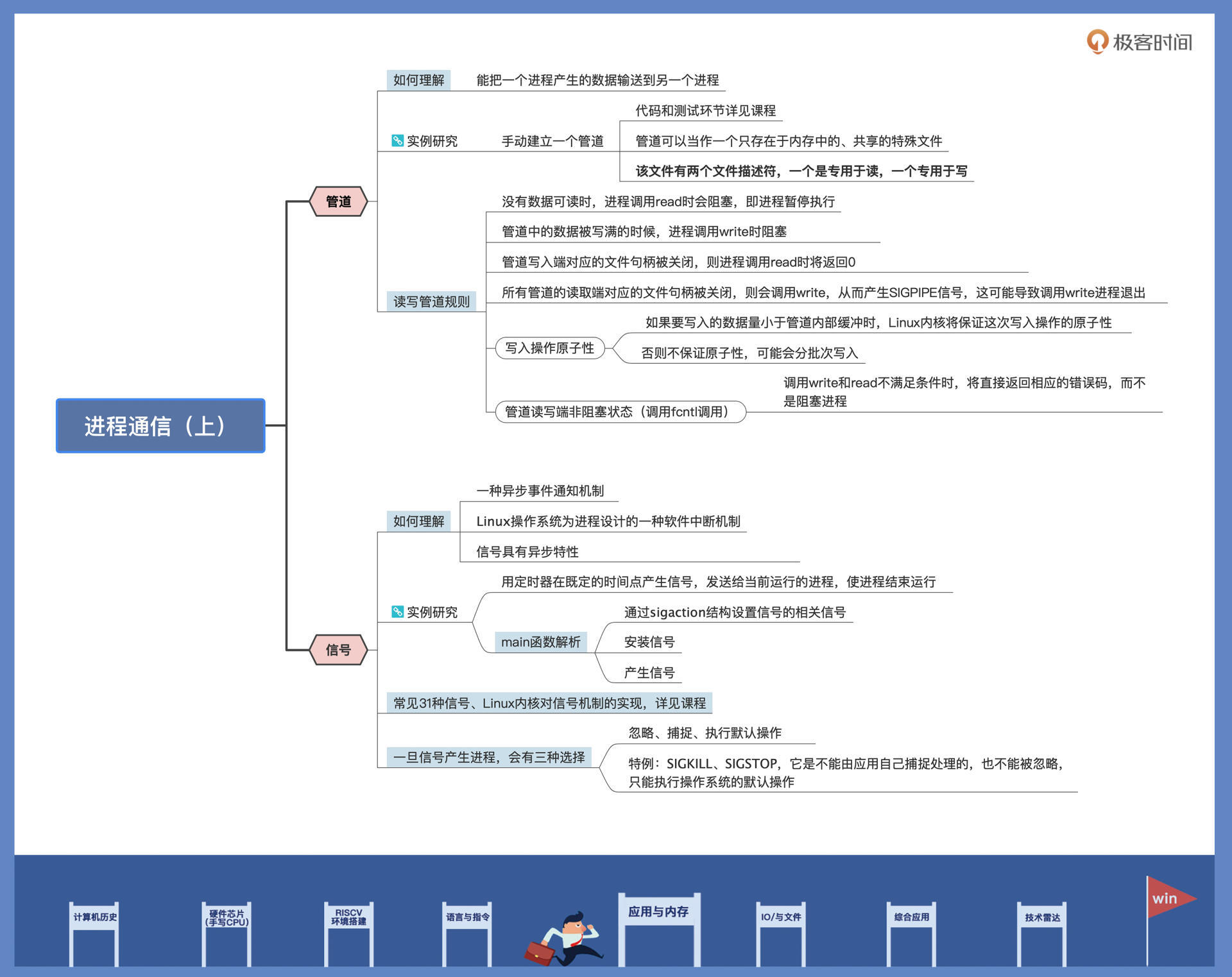
这节课的要点,我梳理了导图,供你参考。
思考题
请概述一下管道和信号这两种通信机制的不同。
期待你在留言区跟我交流互动,也希望你可以把这节课分享给更多朋友。
参考资料
https://learn.lianglianglee.com/%e4%b8%93%e6%a0%8f/%e8%ae%a1%e7%ae%97%e6%9c%ba%e5%9f%ba%e7%a1%80%e5%ae%9e%e6%88%98%e8%af%be/29%20%e5%ba%94%e7%94%a8%e9%97%b4%e9%80%9a%e4%bf%a1%ef%bc%88%e4%b8%80%ef%bc%89%ef%bc%9a%e8%af%a6%e8%a7%a3Linux%e8%bf%9b%e7%a8%8bIPC.md
更多学习
更多实时资讯,前沿技术,生活趣事。尽在【老马啸西风】
交流社群:[交流群信息](https://mp.weixin.qq.com/s/rkSvXxiiLGjl3S-ZOZCr0Q)
