05 共识Raft:如何保证多机房数据的一致性? 你好,我是徐长龙。
上节课我们讲了如何通过Otter实现同城双活机房的数据库同步,但是这种方式并不能保证双机房数据双主的事务强一致性。
如果机房A对某一条数据做了更改,B机房同时修改,Otter会用合并逻辑对冲突的数据行或字段做合并。为了避免类似问题,我们在上节课对客户端做了要求:用户客户端在一段时间内只能访问一个机房。
但如果业务对“事务+强一致”的要求极高,比如库存不允许超卖,那我们通常只有两种选择:一种是将服务做成本地服务,但这个方式并不适合所有业务;另一种是采用多机房,但需要用分布式强一致算法保证多个副本的一致性。
在行业里,最知名的分布式强一致算法要属Paxos,但它的原理过于抽象,在使用过程中经过多次修改会和原设计产生很大偏离,这让很多人不确定自己的修改是不是合理的。而且,很多人需要一到两年的实践经验才能彻底掌握这个算法。
随着我们对分布式多副本同步的需求增多,过于笼统的Paxos已经不能满足市场需要,于是,Raft算法诞生了。
相比Paxos,Raft不仅更容易理解,还能保证数据操作的顺序,因此在分布式数据服务中被广泛使用,像etcd、Kafka这些知名的基础组件都是用Raft算法实现的。
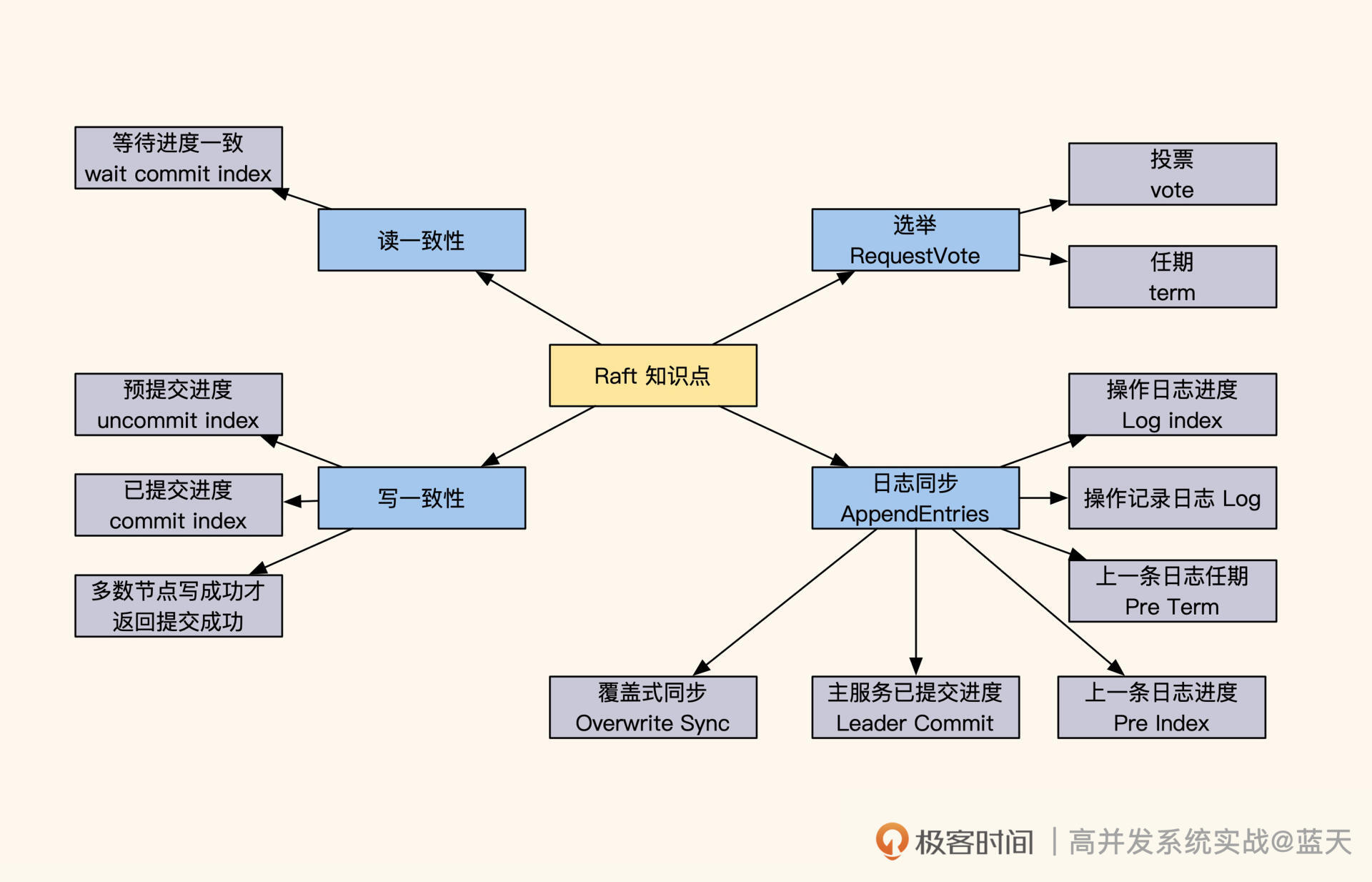
那今天这节课我们就来探寻一下Raft的实现原理,可以说了解了Raft,就相当于了解了分布式强一致性数据服务的半壁江山。几乎所有关于多个数据服务节点的选举、数据更新和同步都是采用类似的方式实现的,只是针对不同的场景和应用做了一些调整。
如何选举Leader?
为了帮你快速熟悉Raft的实现原理,下面我会基于 Raft官方的例子,对Raft进行讲解。
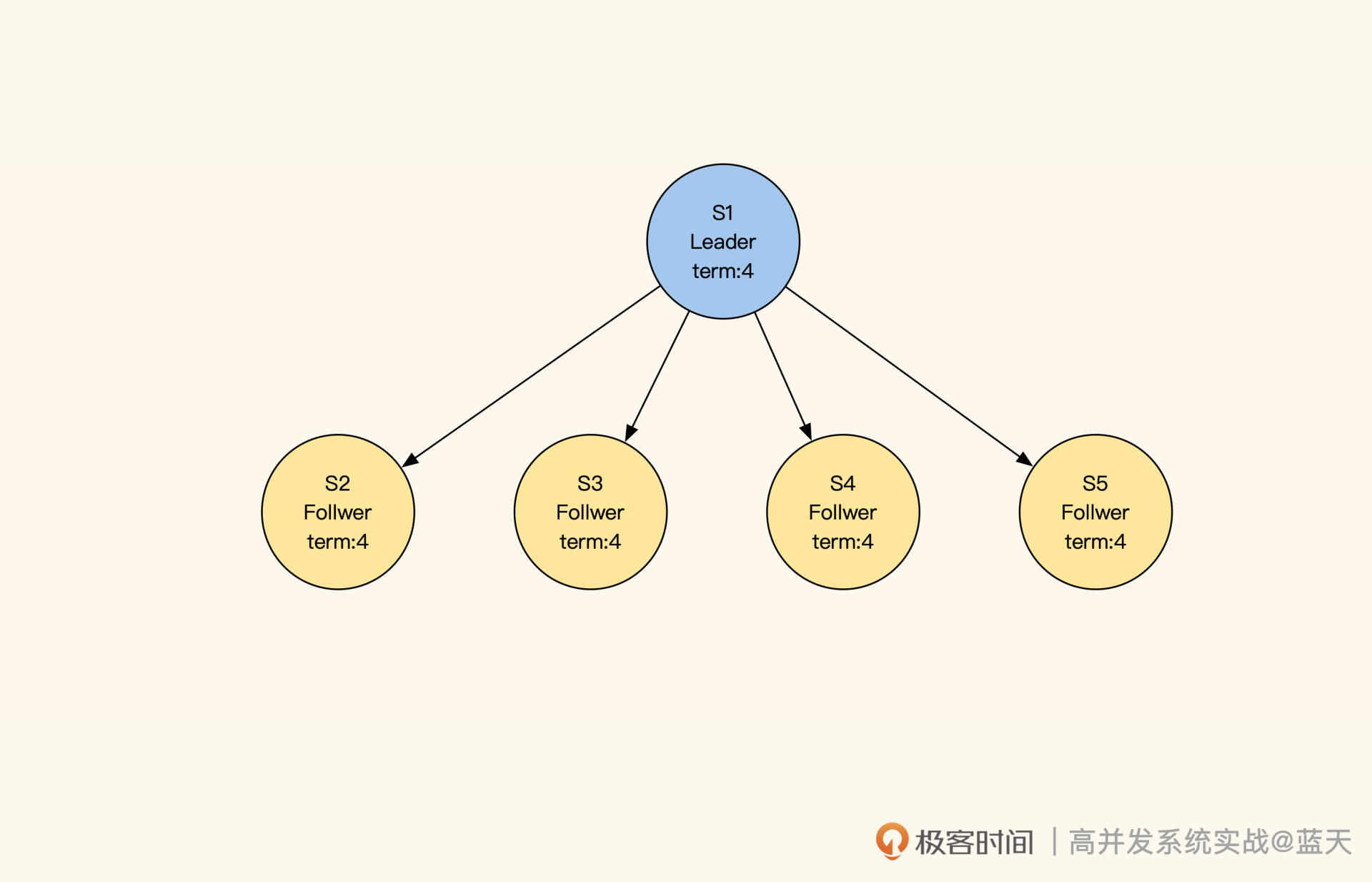
如图所示,我们启动五个Raft分布式数据服务:S1、S2、S3、S4、S5,每个节点都有以下三种状态:
- Leader:负责数据修改,主动同步修改变更给Follower;
- Follower:接收Leader推送的变更数据;
- Candidate:集群中如果没有Leader,那么进入选举模式。
如果集群中的Follower节点在指定时间内没有收到Leader的心跳,那就代表Leader损坏,集群无法更新数据。这时候Follower会进入选举模式,在多个Follower中选出一个Leader,保证一组服务中一直存在一个Leader,同时确保数据修改拥有唯一的决策进程。
那Leader服务是如何选举出来的呢?进入选举模式后,这5个服务会随机等待一段时间。等待时间一到,当前服务先投自己一票,并对当前的任期“term”加 1 (上图中term:4就代表第四任Leader),然后对其他服务发送RequestVote RPC(即请求投票)进行拉票。
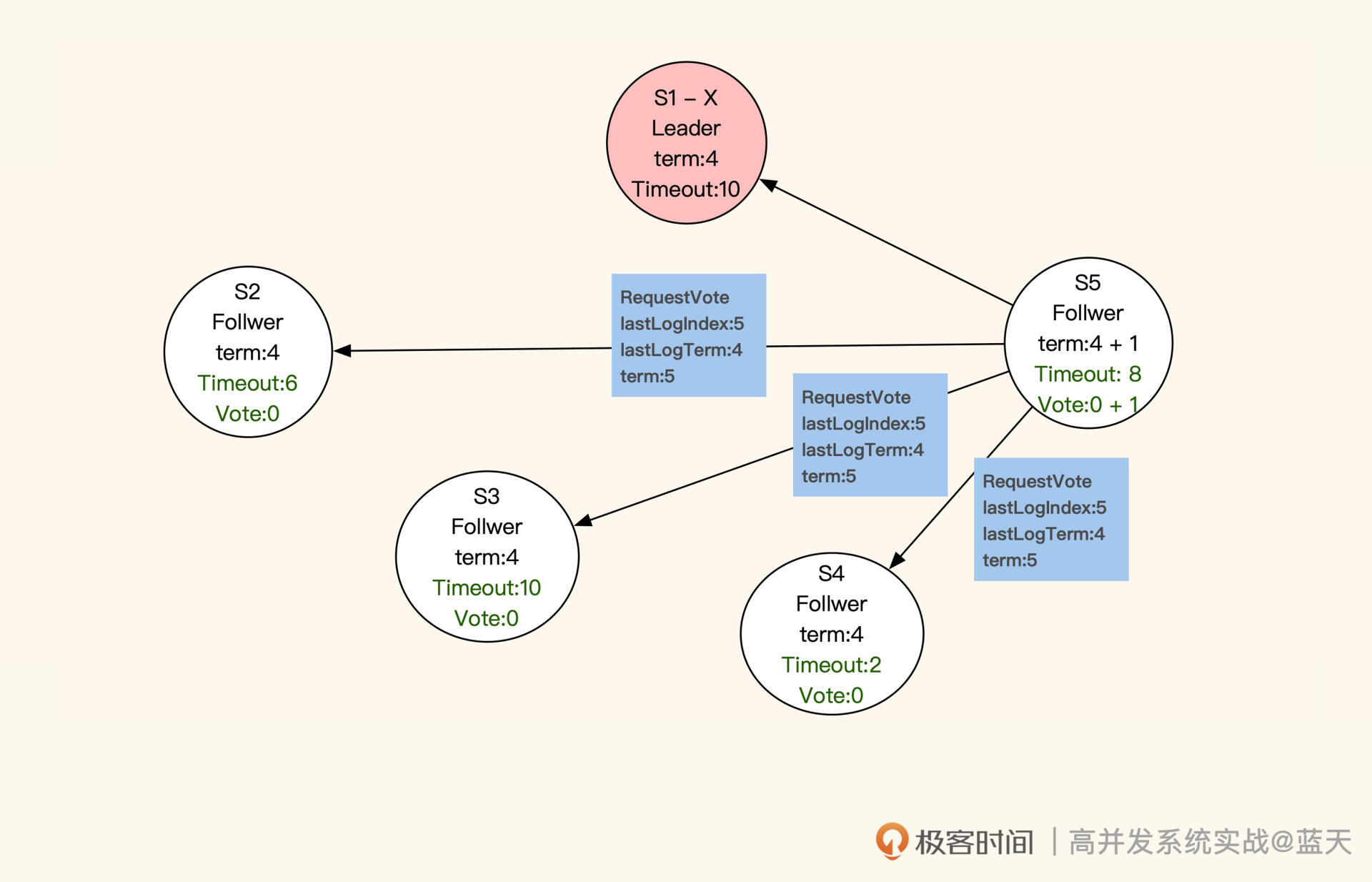
收到投票申请的服务,并且申请服务(即“发送投票申请的服务”)的任期和同步进度都比它超前或相同,那么它就会投申请服务一票,并把当前的任期更新成最新的任期。同时,这个收到投票申请的服务不再发起投票,会等待其他服务邀请。
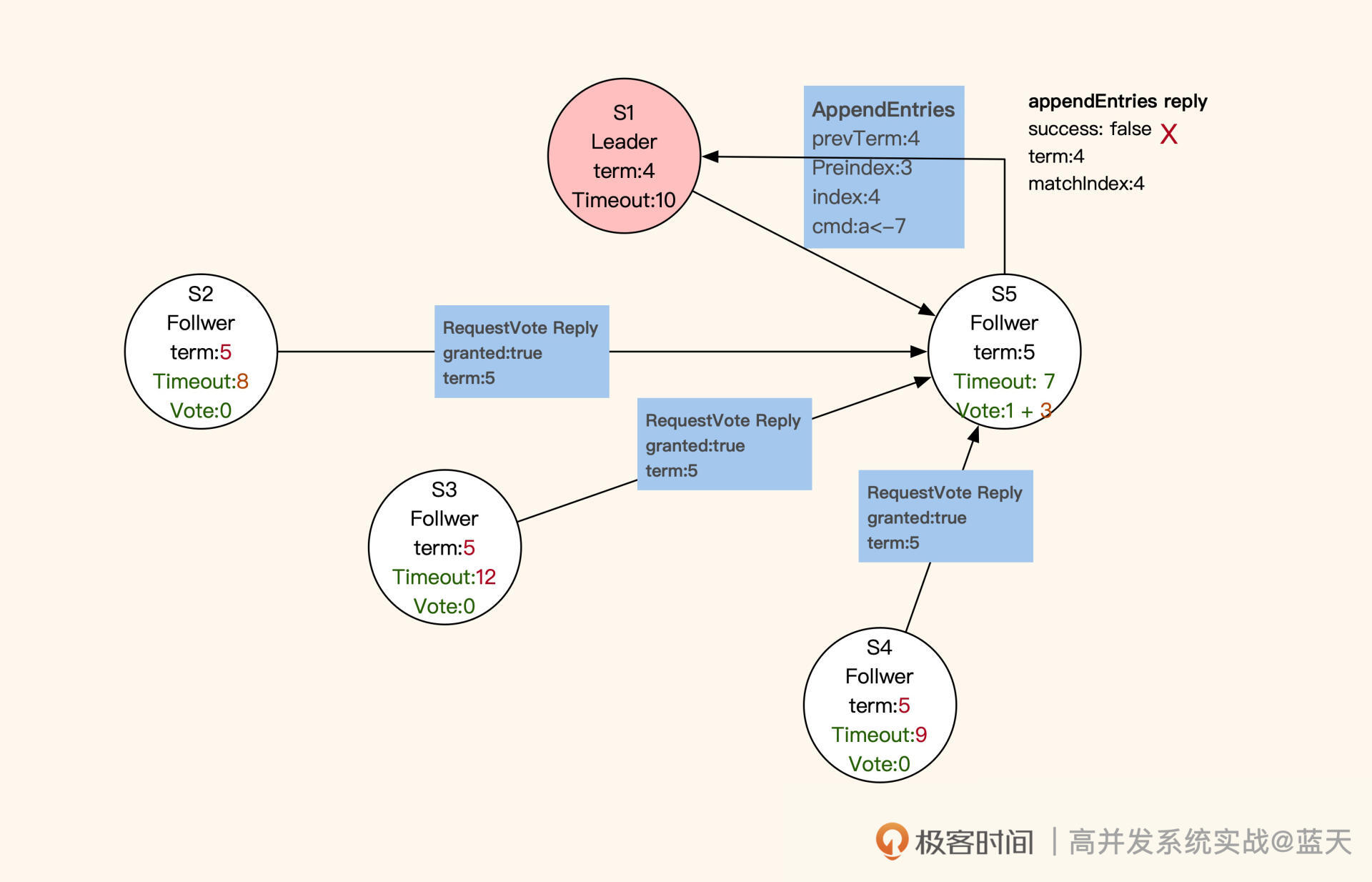
注意,每个服务在同一任期内只投票一次。如果所有服务都没有获取到多数票(三分之二以上服务节点的投票),就会等当前选举超时后,对任期加1,再次进行选举。最终,获取多数票且最先结束选举倒计时的服务会被选为Leader。
被选为Leader的服务会发布广播通知其他服务,并向其他服务同步新的任期和其进度情况。同时,新任Leader会在任职期间周期性发送心跳,保证各个子服务(Follwer)不会因为超时而切换到选举模式。在选举期间,若有服务收到上一任Leader的心跳,则会拒绝(如下图S1)。
选举结束后,所有服务都进入数据同步状态。
如何保证多副本写一致?
在数据同步期间,Follower会与Leader的日志完全保持一致。不难看出,Raft算法采用的也是主从方式同步,只不过Leader不是固定的服务,而是被选举出来的。
这样当个别节点出现故障时,是不会影响整体服务的。不过,这种机制也有缺点:如果Leader失联,那么整体服务会有一段时间忙于选举,而无法提供数据服务。
通常来说,客户端的数据修改请求都会发送到Leader节点(如下图S1)进行统一决策,如果客户端请求发送到了Follower,Follower就会将请求重定向到Leader。那么,Raft是怎么实现同分区数据备份副本的强一致性呢?
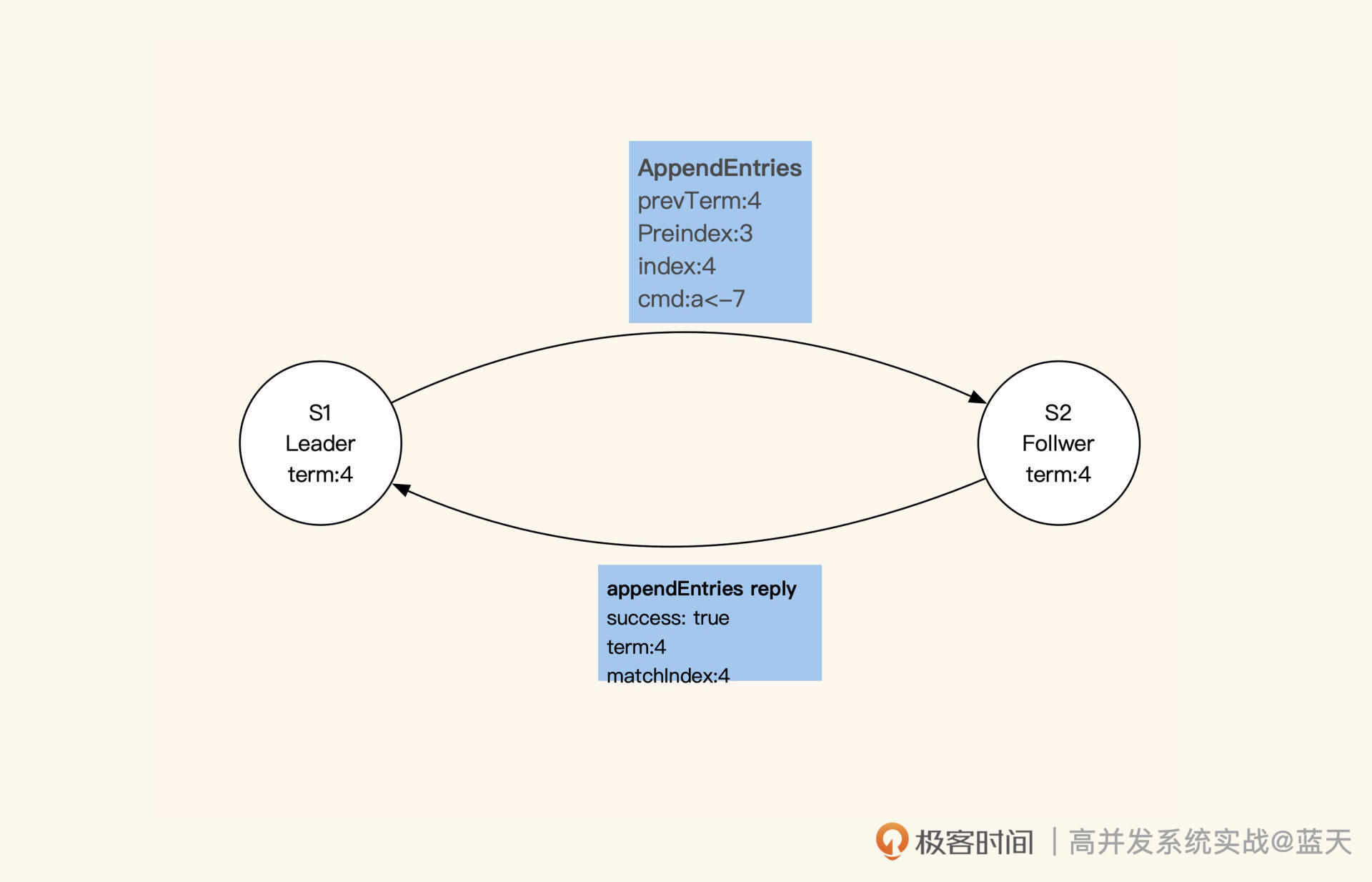
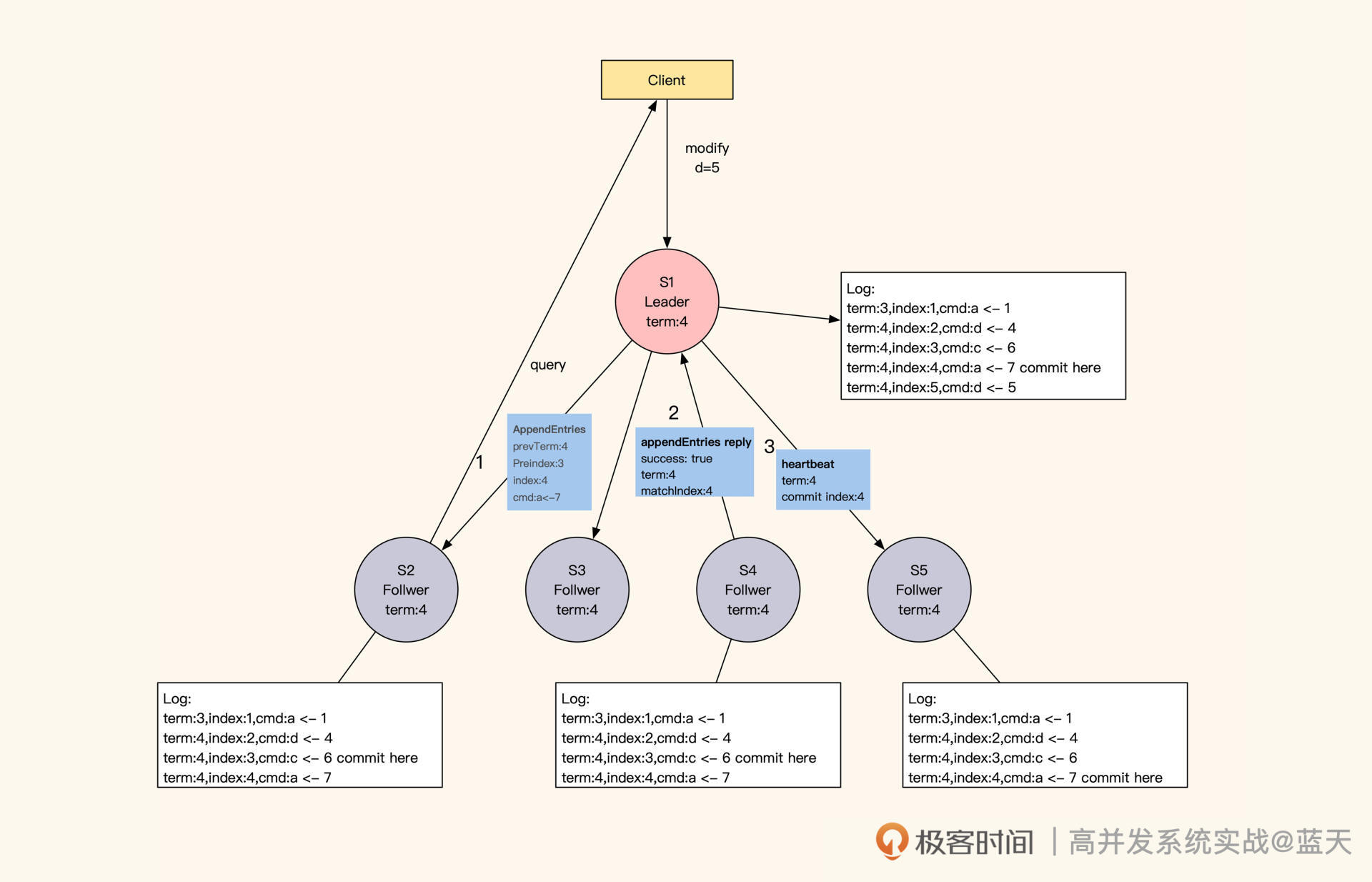 - 具体来讲,Leader成功修改数据后,会产生对应的日志,然后Leader会给所有Follower发送单条日志同步信息。只要大多数Follower返回同步成功,Leader就会对预提交的日志进行commit,并向客户端返回修改成功。
- 具体来讲,Leader成功修改数据后,会产生对应的日志,然后Leader会给所有Follower发送单条日志同步信息。只要大多数Follower返回同步成功,Leader就会对预提交的日志进行commit,并向客户端返回修改成功。
接着,Leader在下一次心跳时(消息中leader commit字段),会把当前最新commit的Log index(日志进度)告知给各Follower节点,然后各Follower按照这个index进度对外提供数据,未被Leader最终commit的数据则不会落地对外展示。
如果在数据同步期间,客户端还有其他的数据修改请求发到Leader,那么这些请求会排队,因为这时候的Leader在阻塞等待其他节点回应。
不过,这种阻塞等待的设计也让Raft算法对网络性能的依赖很大,因为每次修改都要并发请求多个节点,等待大部分节点成功同步的结果。
最惨的情况是,返回的RTT会按照最慢的网络服务响应耗时(“两地三中心”的一次同步时间为100ms左右),再加上主节点只有一个,一组Raft的服务性能是有上限的。对此,我们可以减少数据量并对数据做切片,提高整体集群的数据修改性能。
请你注意,当大多数Follower与Leader同步的日志进度差异过大时,数据变更请求会处于等待状态,直到一半以上的Follower与Leader的进度一致,才会返回变更成功。当然,这种情况比较少见。
服务之间如何同步日志进度?
讲到这我们不难看出,在Raft的数据同步机制中,日志发挥着重要的作用。在同步数据时,Raft采用的日志是一个有顺序的指令日志WAL(Write Ahead Log),类似MySQL的binlog。该日志中记录着每次修改数据的指令和修改任期,并通过Log Index标注了当前是第几条日志,以此作为同步进度的依据。
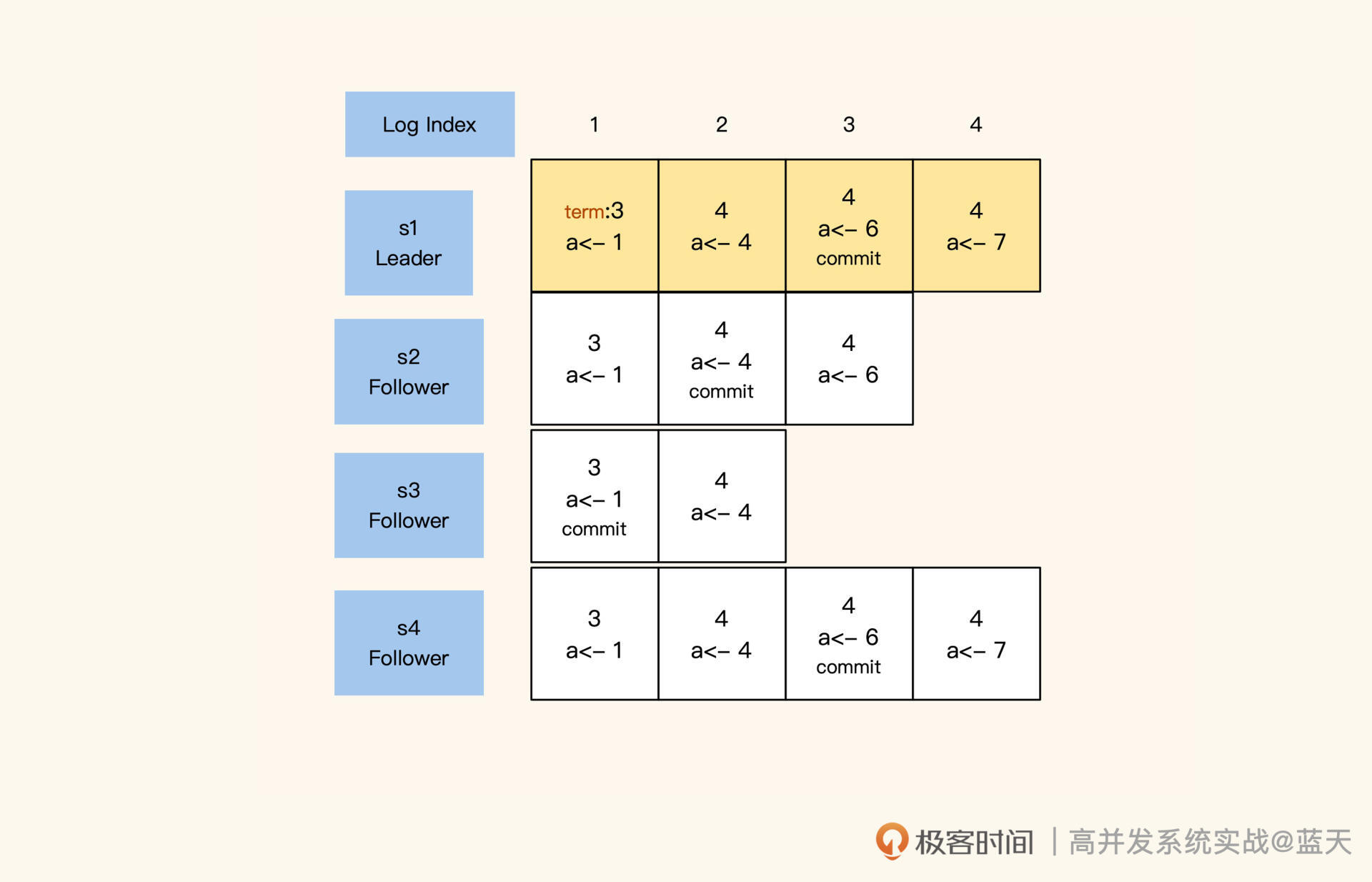
其中,Leader的日志永远不会删除,所有的Follower都会保持和Leader 完全一致,如果存在差异也会被强制覆盖。同时,每个日志都有“写入”和“commit”两个阶段,在选举时,每个服务会根据还未commit的Log Index进度,优先选择同步进度最大的节点,以此保证选举出的Leader拥有最新最全的数据。
Leader在任期内向各节点发送同步请求,其实就是按顺序向各节点推送一条条日志。如果Leader同步的进度比Follower超前,Follower就会拒绝本次同步。
Leader收到拒绝后,会从后往前一条条找出日志中还未同步的部分或者有差异的部分,然后开始一个个往后覆盖实现同步。
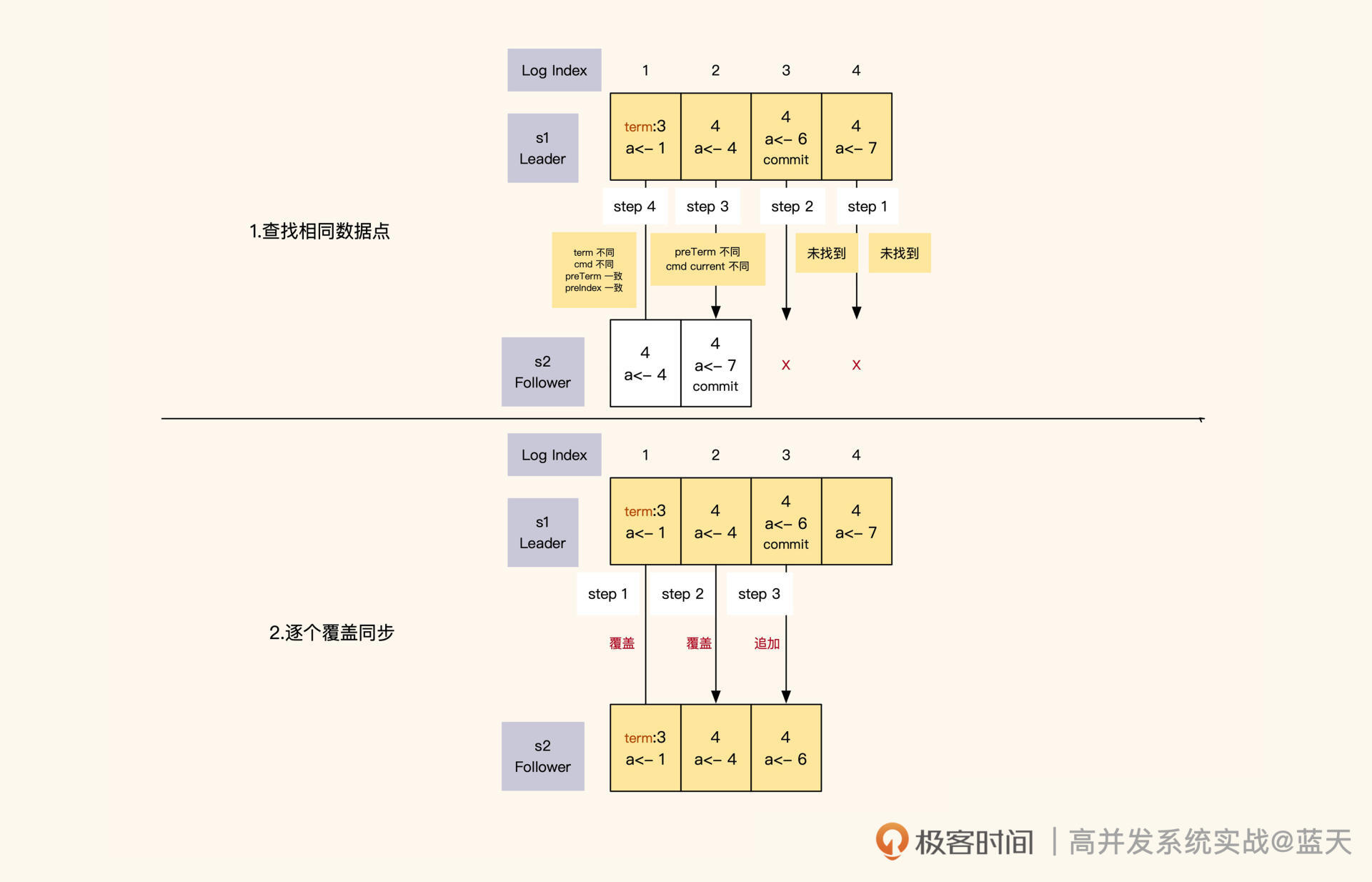
Leader和Follower的日志同步进度是通过日志index来确认的。Leader对日志内容和顺序有绝对的决策权,当它发现自己的日志和Follower的日志有差异时,为了确保多个副本的数据是完全一致的,它会强制覆盖Follower的日志。
那么Leader是怎么识别出Follower的日志与自己的日志有没有差异呢?实际上,Leader给Follower同步日志的时候,会同时带上Leader上一条日志的任期和索引号,与Follower当前的同步进度进行对比。
对比分为两个方面:一方面是对比Leader和Follower当前日志中的index、多条操作日志和任期;另一方面是对比Leader和Follower上一条日志的index和任期。
如果有任意一个不同,那么Leader就认为Follower的日志与自己的日志不一致,这时候Leader会一条条倒序往回对比,直到找到日志内容和任期完全一致的index,然后从这个index开始正序向下覆盖。同时,在日志数据同步期间,Leader只会commit其所在任期内的数据,过往任期的数据完全靠日志同步倒序追回。
你应该已经发现了,这样一条条推送同步有些缓慢,效率不高,这导致Raft对新启动的服务不是很友好。所以Leader会定期打快照,通过快照合并之前修改日志的记录,来降低修改日志的大小。而同步进度差距过大的Follower会从Leader最新的快照中恢复数据,按快照最后的index追赶进度。
如何保证读取数据的强一致性?
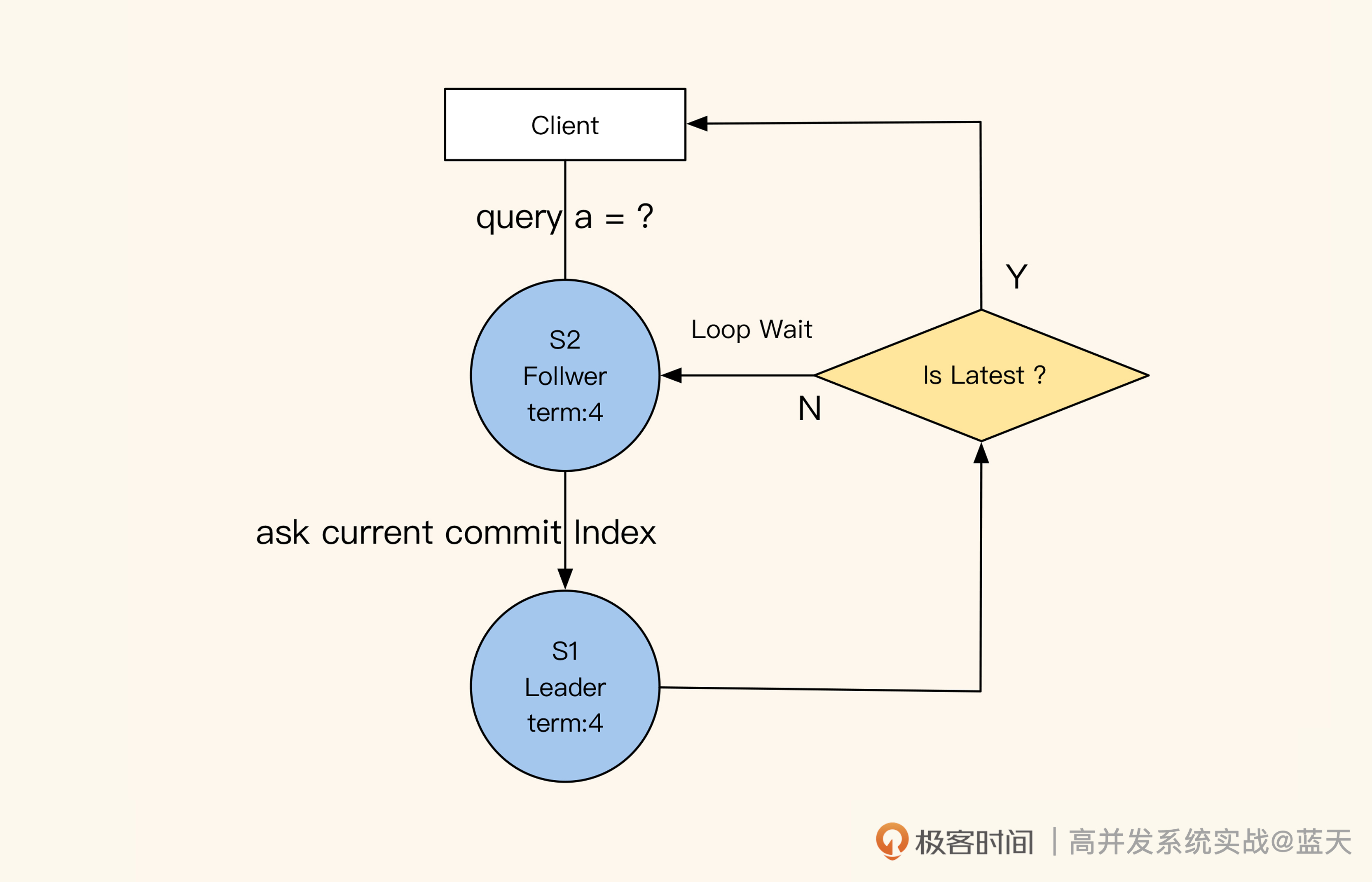
通过前面的讲解,我们知道了Leader和Follower之间是如何做到数据同步的,那从Follower的角度来看,它又是怎么保证自己对外提供的数据是最新的呢?
这里有个小技巧,就是Follower在收到查询请求时,会顺便问一下Leader当前最新commit的log index是什么。如果这个log index大于当前Follower同步的进度,就说明Follower的本地数据不是最新的,这时候Follower就会从Leader获取最新的数据返回给客户端。可见,保证数据强一致性的代价很大。
你可能会好奇:如何在业务使用时保证读取数据的强一致性呢?其实我们之前说的Raft同步等待Leader commit log index的机制,已经确保了这一点。我们只需要向Leader正常提交数据修改的操作,Follower读取时拿到的就一定是最新的数据。
总结
很多人都说Raft是一个分布式一致性算法,但实际上Raft算法是一个共识算法(多个节点达成共识),它通过任期机制、随机时间和投票选举机制,实现了服务动态扩容及服务的高可用。
通过Raft采用强制顺序的日志同步实现多副本的数据强一致同步,如果我们用Raft算法实现用户的数据存储层,那么数据的存储和增删改查,都会具有跨机房的数据强一致性。这样一来,业务层就无需关心一致性问题,对数据直接操作,即可轻松实现多机房的强一致同步。
由于这种方式的同步代价和延迟都比较大,建议你尽量在数据量和修改量都比较小的场景内使用,行业里也有很多针对不同场景设计的库可以选择,如:parallel-raft、multi-paxos、SOFAJRaft等,更多请参考Raft的底部开源列表。
思考题
最后,请你思考一下,为什么Raft集群成员增减需要特殊去做?
欢迎你在留言区与我交流讨论,我们下节课见!
参考资料
https://learn.lianglianglee.com/%e4%b8%93%e6%a0%8f/%e9%ab%98%e5%b9%b6%e5%8f%91%e7%b3%bb%e7%bb%9f%e5%ae%9e%e6%88%98%e8%af%be/05%20%e5%85%b1%e8%af%86Raft%ef%bc%9a%e5%a6%82%e4%bd%95%e4%bf%9d%e8%af%81%e5%a4%9a%e6%9c%ba%e6%88%bf%e6%95%b0%e6%8d%ae%e7%9a%84%e4%b8%80%e8%87%b4%e6%80%a7%ef%bc%9f.md
更多学习
更多实时资讯,前沿技术,生活趣事。尽在【老马啸西风】
交流社群:[交流群信息](https://mp.weixin.qq.com/s/rkSvXxiiLGjl3S-ZOZCr0Q)
