25 PubSub在主从故障切换时是如何发挥作用的? 在前面两节课,我们学习了哨兵工作的基本过程:哨兵会使用 sentinelRedisInstance 结构体来记录主节点的信息,在这个结构体中又记录了监听同一主节点的其他哨兵的信息。那么,一个哨兵是如何获得其他哨兵的信息的呢?
这其实就和哨兵在运行过程中,使用的发布订阅(Pub/Sub)通信方法有关了。Pub/Sub 通信方法可以让哨兵订阅一个或多个频道,当频道中有消息时,哨兵可以收到相应消息;同时,哨兵也可以向频道中发布自己生成的消息,以便订阅该频道的其他客户端能收到消息。
今天这节课,我就带你来了解发布订阅通信方法的实现,以及它在哨兵工作过程中的应用。同时,你还可以了解哨兵之间是如何发现彼此的,以及客户端是如何知道故障切换完成的。Pub/Sub 通信方法在分布式系统中可以用作多对多的信息交互,在学完这节课之后,当你要实现分布式节点间通信时,就可以把它应用起来。
好了,接下来,我们先来看下发布订阅通信方法的实现。
发布订阅通信方法的实现
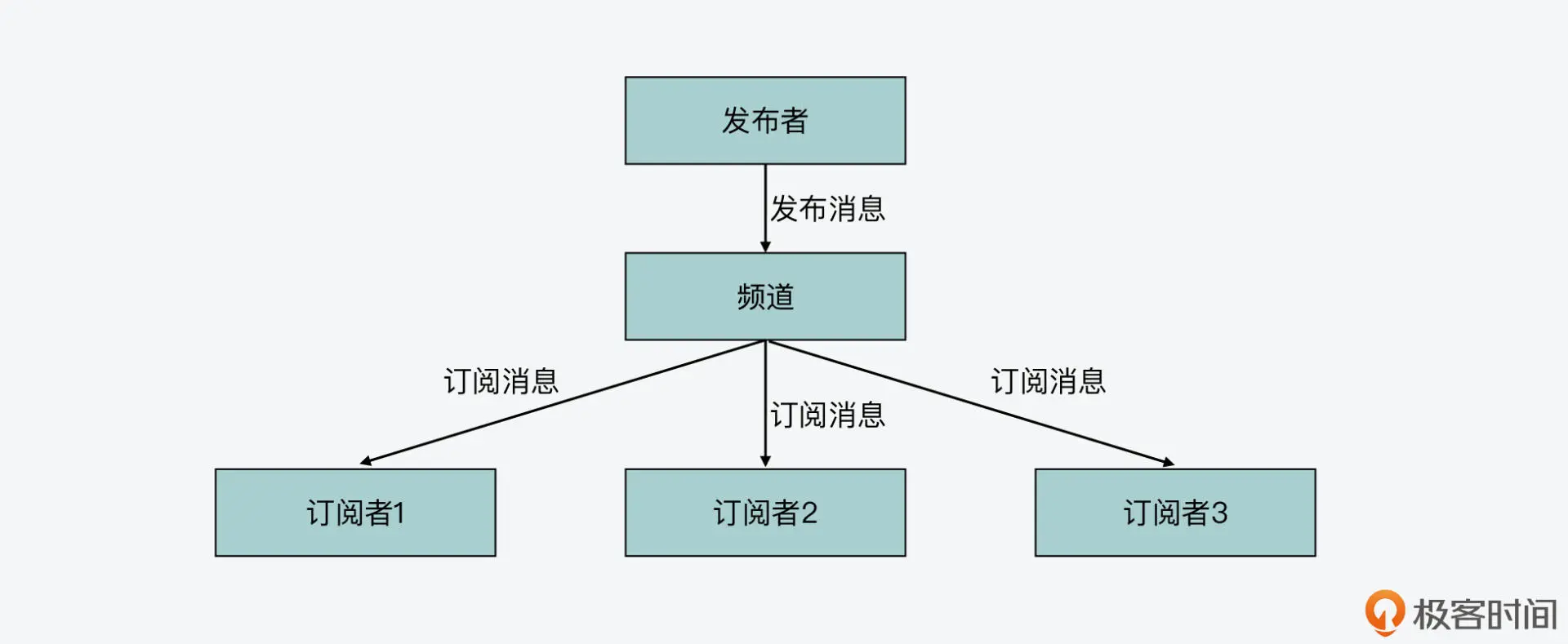
发布订阅通信方法的基本模型是包含发布者、频道和订阅者,发布者把消息发布到频道上,而订阅者会订阅频道,一旦频道上有消息,频道就会把消息发送给订阅者。一个频道可以有多个订阅者,而对于一个订阅者来说,它也可以订阅多个频道,从而获得多个发布者发布的消息。
下图展示的就是发布者 - 频道 - 订阅者的基本模型,你可以看下。
频道的实现
了解了发布订阅方法的基本模型后,我们就来看下频道是如何实现的,因为在发布订阅通信方法中,频道很重要,它是发布者和订阅者之间通信的基础。
其实,Redis 的全局变量 server 使用了一个成员变量 pubsub_channels 来保存频道,pubsub_channels 的初始化是在 initServer 函数(在server.c文件中)中完成的。initServer 函数会调用 dictCreate 创建一个 keylistDictType 类型的哈希表,然后用这个哈希表来保存频道的信息,如下所示: void initServer(void) { … server.pubsub_channels = dictCreate(&keylistDictType,NULL); … }
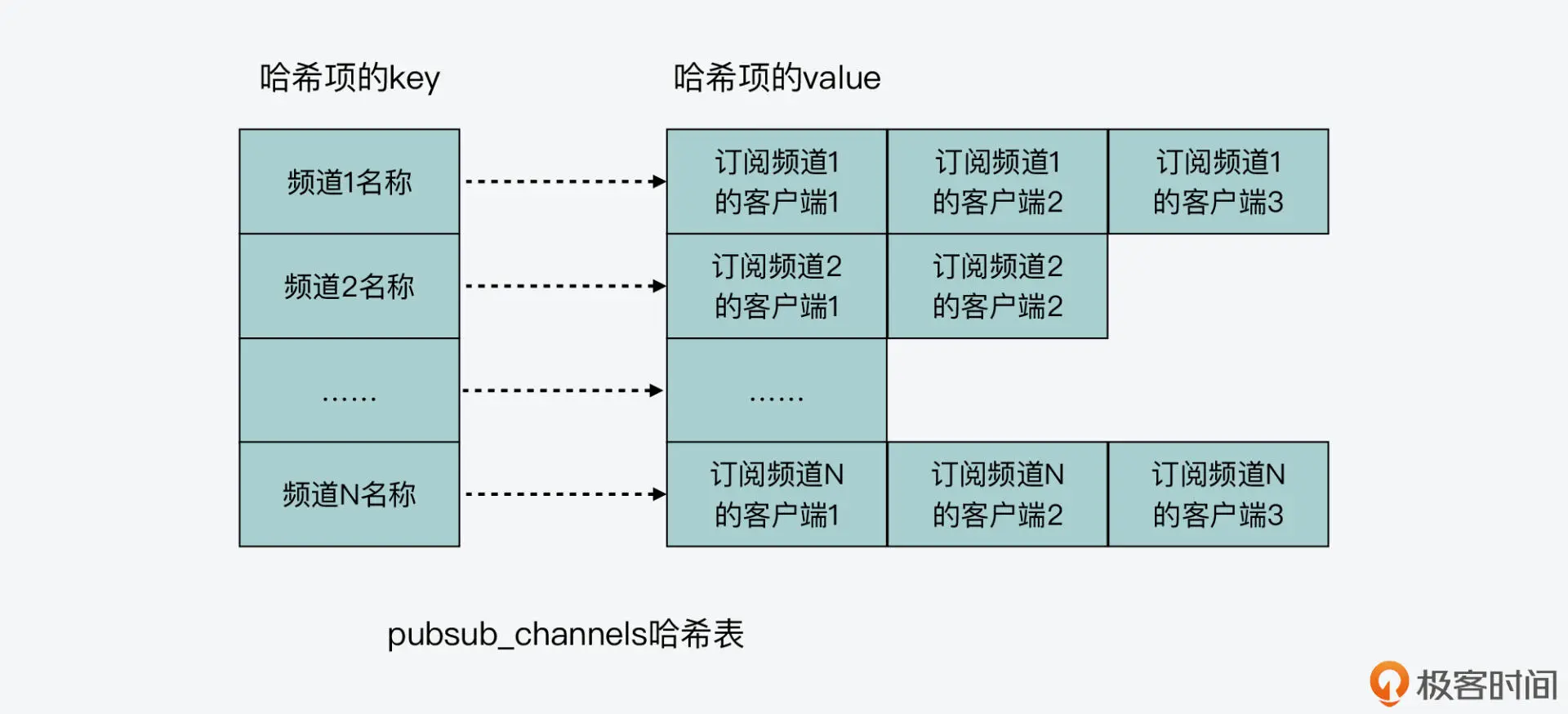
注意,当哈希表是 keylistDictType 类型时,它保存的哈希项的 value 就是一个列表。而之所以采用这种类型来保存频道信息,是因为 Redis 把频道的名称作为哈希项的 key,而把订阅频道的订阅者作为哈希项的 value。就像刚才我们介绍的,一个频道可以有多个订阅者,所以 Redis 在实现时,就会用列表把订阅同一个频道的订阅者保存起来。
pubsub_channels 哈希表保存频道和订阅者的示意图如下所示:
了解了频道是如何实现的之后,下面我们再分别看下发布命令和订阅命令的实现。
发布命令的实现
发布命令在 Redis 的实现中对应的是 publish。我在【第 14 讲】中给你介绍过,Redis server 在初始化时,会初始化一个命令表 redisCommandTable,表中就记录了 Redis 支持的各种命令,以及对应的实现函数。
这张命令表是在 server.c 文件中定义的,当你需要了解 Redis 某个命令的具体实现函数时,一个快捷的方式就是在这张表中查找对应命令,然后就能定位到该命令的实现函数了。我们同样可以用这个方法来定位 publish 命令,这样就可以看到它对应的实现函数是 publishCommand(在pubsub.c文件中),如下所示: struct redisCommand redisCommandTable[] = { … {“publish”,publishCommand,3,”pltF”,0,NULL,0,0,0,0,0}, … }
我们来看下 publishCommand 函数,它是调用 pubsubPublishMessage 函数(在 pubsub.c 文件中)来完成消息的实际发送,然后,再返回接收消息的订阅者数量的,如下所示:
void publishCommand(client /*c) { //调用pubsubPublishMessage发布消息 int receivers = pubsubPublishMessage(c->argv[1],c->argv[2]); … //如果Redis启用了cluster,那么在集群中发送publish命令 addReplyLongLong(c,receivers); //返回接收消息的订阅者数量 }
而对于 pubsubPublishMessage 函数来说,它的原型如下。你可以看到,它的两个参数分别是要发布消息的频道,以及要发布的具体消息。
int pubsubPublishMessage(robj /channel, robj /message)
pubsubPublishMessage 函数会在 server.pubsub_channels 哈希表中,查找要发布的频道。如果找见了,它就会遍历这个 channel 对应的订阅者列表,然后依次向每个订阅者发送要发布的消息。这样一来,只要订阅者订阅了这个频道,那么发布者发布消息时,它就能收到了。
//查找频道是否存在 de = dictFind(server.pubsub_channels,channel); if (de) { //频道存在 … //遍历频道对应的订阅者,向订阅者发送要发布的消息 while ((ln = listNext(&li)) != NULL) { client /*c = ln->value; … addReplyBulk(c,channel); addReplyBulk(c,message); receivers++; } }
好了,了解了发布命令后,我们再来看下订阅命令的实现。
订阅命令的实现
和查找发布命令的方法一样,我们可以在 redisCommandTable 表中,找到订阅命令 subscribe 对应的实现函数是 subscribeCommand(在 pubsub.c 文件中)。
subscribeCommand 函数的逻辑比较简单,它会直接调用 pubsubSubscribeChannel 函数(在 pubsub.c 文件中)来完成订阅操作,如下所示: void subscribeCommand(client /*c) { int j; for (j = 1; j < c->argc; j++) pubsubSubscribeChannel(c,c->argv[j]); c->flags |= CLIENT_PUBSUB; }
从代码中,你可以看到,subscribeCommand 函数的参数是 client 类型的变量,而它会根据 client 的 argc 成员变量执行一个循环,并把 client 的每个 argv 成员变量传给 pubsubSubscribeChannel 函数执行。
对于 client 的 argc 和 argv 来说,它们分别代表了要执行命令的参数个数和具体参数值,那么,这里的参数值是指什么呢?
其实,我们来看下 pubsubSubscribeChannel 函数的原型就能知道了,如下所示: int pubsubSubscribeChannel(client /c, robj /channel)
pubsubSubscribeChannel 函数的参数除了 client 变量外,还会接收频道的信息,这也就是说,subscribeCommand 会按照 subscribe 执行时附带的频道名称,来逐个订阅频道。我也在下面展示了 subscribe 命令执行的一个示例,你可以看下。当这个 subscribe 命令执行时,它会订阅三个频道,分别是 channel1、channel2 和 channel3:
subscribe channel1 channel2 channel3
下面我们来具体看下 pubsubSubscribeChannel 函数的实现。这个函数的逻辑也比较清晰,主要可以分成三步。
首先,它把要订阅的频道加入到 server 记录的 pubsub_channels 中。如果这个频道是新创建的,那么它会在 pubsub_channels 哈希表中新建一个哈希项,代表新创建的这个频道,并且会创建一个列表,用来保存这个频道对应的订阅者。
如果频道已经在 pubsub_channels 哈希表中存在了,那么 pubsubSubscribeChannel 函数就直接获取该频道对应的订阅者列表。
然后,pubsubSubscribeChannel 函数把执行 subscribe 命令的订阅者,加入到订阅者列表中。
最后,pubsubSubscribeChannel 函数会把成功订阅的频道个数返回给订阅者。
下面的代码展示了这部分的逻辑,你可以看下。 if (dictAdd(c->pubsub_channels,channel,NULL) == DICT_OK) { … de = dictFind(server.pubsub_channels,channel); //在pubsub_channels哈希表中查找频道 if (de == NULL) { //如果频道不存在 clients = listCreate(); //创建订阅者对应的列表 dictAdd(server.pubsub_channels,channel,clients); //新插入频道对应的哈希项 … } else { clients = dictGetVal(de); //频道已存在,获取订阅者列表 } listAddNodeTail(clients,c); //将订阅者加入到订阅者列表 } … addReplyLongLong(c,clientSubscriptionsCount(c)); //给订阅者返回成功订阅的频道数量
现在,你就了解了 Redis 中发布订阅方法的实现。接下来,我们来看下哨兵在工作过程中,又是如何使用发布订阅功能的。
发布订阅方法在哨兵中的应用
首先,我们来看下哨兵用来发布消息的函数 sentinelEvent。
sentinelEvent 函数与消息生成
哨兵在使用发布订阅方法时,封装了 sentinelEvent 函数(在sentinel.c文件中),用来发布消息。所以,你在阅读 sentinel.c 文件中关于哨兵的源码时,如果看到 sentinelEvent,这就表明哨兵正在用它来发布消息。
我在【第 22 讲】中给你介绍过 sentinelEvent 函数,你可以再回顾下。这个函数的原型如下所示: void sentinelEvent(int level, char /type, sentinelRedisInstance /ri, const char /*fmt, …)
实际上,这个函数最终是通过调用刚才我提到的 pubsubPublishMessage 函数,来实现向某一个频道发布消息的。那么,当我们要发布一条消息时,需要确定两个方面的内容:一个是要发布的频道,另一个是要发布的消息。
sentinelEvent 函数的第二个参数 type,表示的就是要发布的频道,而要发布的消息,就是由这个函数第四个参数 fmt 后面的省略号来表示的。
看到这里,你可以会有一个疑问,为什么 sentinelEvent 函数参数中会有省略号?
其实,这里的省略号表示的是可变参数,当我们无法列出传递给函数的所有实参类型和数目时,我们可以用省略号来表示可变参数,这就是说,我们可以给 sentinelEvent 函数传递 4 个、5 个、6 个甚至更多的参数。
我在这里就以 sentinelEvent 函数的实现为例,给你介绍下可变参数的使用,这样一来,当你在开发分布式通信程序时,需要生成内容不定的消息时,就可以把哨兵源码中实现的方法用起来。
在 sentinelEvent 函数中,为了使用了可变参数,它主要包含了四个步骤:
- 首先,我们需要定义一个 va_list 类型的变量,假设是 ap。这个变量是指向可变参数的指针。
- 然后,当我们要在函数中使用可变参数了,就需要通过 va_start 宏来获取可变参数中的第一个参数。va_start 宏有两个参数,一个是刚才定义的 va_list 类型变量 ap,另一个是可变参数的前一个参数,也就是 sentinelEvent 函数参数中,省略号前的参数 fmt。
- 紧接着,我们可以使用 vsnprintf 函数,来按照 fmt 定义的格式,打印可变参数中的内容。vsnprintf 函数会逐个获取可变参数中的每一个参数,并进行打印。
- 最后,我们在获取完所有参数后,需要调用 va_end 宏将刚才创建的 ap 指针关闭。
下面的代码展示了刚才介绍的这个过程,你可以再看下。 void sentinelEvent(int level, char /type, sentinelRedisInstance /ri, const char /*fmt, …) { va_list ap; … if (fmt[0] != ‘\0’) { va_start(ap, fmt); vsnprintf(msg+strlen(msg), sizeof(msg)-strlen(msg), fmt, ap); va_end(ap); } … }
为了让你有个更加直观的了解,我在下面列了三个 sentinelEvent 函数的调用示例,你可以再学习掌握下。
第一个对应了哨兵调用 sentinelCheckSubjectivelyDown 函数检测出主节点主观下线后,sentinelCheckSubjectivelyDown 函数调用 sentinelEvent 函数,向“+sdown”频道发布消息。此时,传递给 sentinelEvent 的参数就是 4 个,并没有可变参数,如下所示: sentinelEvent(LL_WARNING,”+sdown”,ri,”%@”);
第二个对应了哨兵在初始化时,在 sentinelGenerateInitialMonitorEvents 函数中,调用 sentinelEvent 函数向“+monitor”频道发布消息,此时,传递给 sentinelEvent 的参数有 5 个,包含了 1 个可变参数,表示的是哨兵的 quorum 阈值,如下所示:
sentinelEvent(LL_WARNING,”+monitor”,ri,”%@ quorum %d”,ri->quorum);
最后一个对应了哨兵在完成主节点切换后,在 sentinelFailoverSwitchToPromotedSlave 函数中,调用 sentinelEvent 函数向“+switch-master”频道发布消息。此时,传递给 sentinelEvent 的可变参数一共有 5 个,对应了故障切换前的主节点名称、IP 和端口号,以及切换后升级为主节点的从节点 IP 和端口号,如下所示:
sentinelEvent(LL_WARNING,”+switch-master”,master,”%s %s %d %s %d”, master->name, master->addr->ip, master->addr->port, ref->addr->ip, ref->addr->port);
这样一来,你也就了解了,哨兵在工作过程中是通过 sentinelEvent 函数和 pubsubPublishMessage 函数,来实现消息的发布的。在哨兵的整个工作过程中,它会在一些关键节点上,使用 sentinelEvent 函数往不同的频道上发布消息。除了刚才给你举例的三个频道 +monitor、+sdown、+switch-master 以外,我还把哨兵在工作过程中会用到的消息发布频道列在了下表中,你可以了解下。
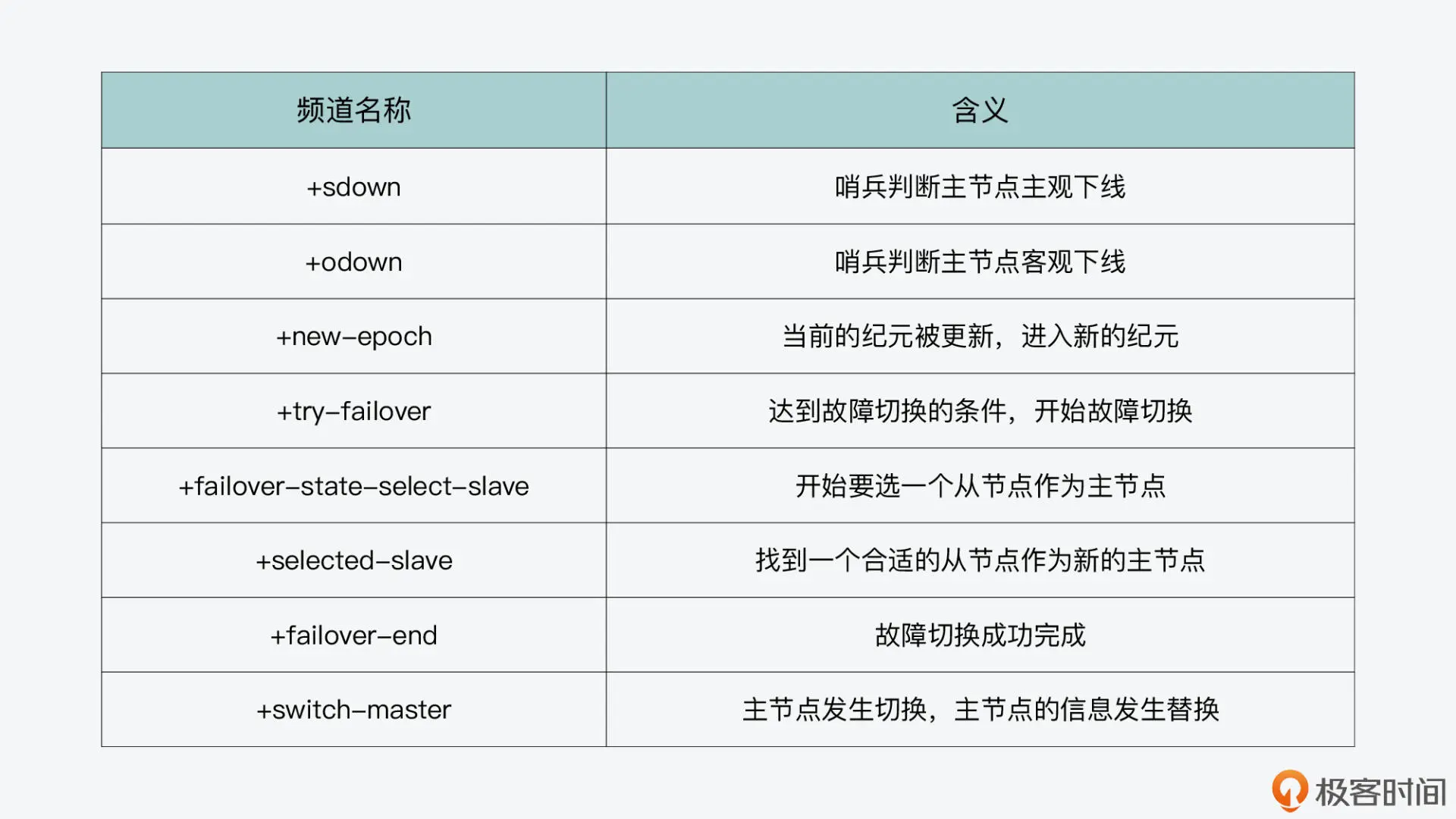
其实,在哨兵的工作过程中,如果有客户端想要了解故障切换的整体情况或进度,比如主节点是否被判断为主观下线、主节点是否被判断为客观下线、Leader 是否完成选举、新主节点是否切换完成,等等,就可以通过 subscribe 命令,订阅上面这张表中的相应频道。这样一来,客户端就可以了解故障切换的过程了。
好,下面我们再来看下,哨兵在工作过程中对消息的订阅是如何实现的。
哨兵订阅与 hello 频道
首先你要知道,每个哨兵会订阅它所监听的主节点的”sentinel:hello”频道。在【第 23 讲】中,我给你介绍过,哨兵会周期性调用 sentinelTimer 函数来完成周期性的任务,这其中,就有哨兵订阅主节点 hello 频道的操作。
具体来说,哨兵在周期性执行 sentinelTimer 函数时,会调用 sentinelHandleRedisInstance 函数,进而调用 sentinelReconnectInstance 函数。而在 sentinelReconnectInstance 函数中,哨兵会调用 redisAsyncCommand 函数,向主节点发送 subscribe 命令,订阅的频道由宏定义 SENTINEL_HELLO_CHANNEL(在 sentinel.c 文件中)指定,也就是”sentinel:hello”频道。这部分的代码如下所示: retval = redisAsyncCommand(link->pc, sentinelReceiveHelloMessages, ri, “%s %s”, sentinelInstanceMapCommand(ri,”SUBSCRIBE”), SENTINEL_HELLO_CHANNEL);
从代码中,我们也可以看到,当在”sentinel:hello”频道上收到 hello 消息后,哨兵会回调 sentinelReceiveHelloMessages 函数来进行处理。而 sentinelReceiveHelloMessages 函数,实际是通过调用 sentinelProcessHelloMessage 函数,来完成 hello 消息的处理的。
对于 sentinelProcessHelloMessage 函数来说,它主要是从 hello 消息中获得发布 hello 消息的哨兵实例的基本信息,比如 IP、端口号、quorum 阈值等。如果当前哨兵并没有记录发布 hello 消息的哨兵实例的信息,那么,sentinelProcessHelloMessage 函数就会调用 createSentinelRedisInstance 函数,来创建发布 hello 消息的哨兵实例的信息记录,这样一来,当前哨兵就拥有了其他哨兵实例的信息了。
好了,了解了哨兵对”sentinel:hello”频道的订阅和处理后,我们还需要搞清楚一个问题,即哨兵是在什么时候发布 hello 消息的呢?
这其实是哨兵在 sentinelTimer 函数中,调用 sentinelSendPeriodicCommands 函数时,由 sentinelSendPeriodicCommands 函数调用 sentinelSendHello 函数来完成的。
sentinelSendHello 函数会调用 redisAsyncCommand 函数,向主节点的”sentinel:hello”频道发布 hello 消息。在它发送的 hello 消息中,包含了发布 hello 消息的哨兵实例的 IP、端口号、ID 和当前的纪元,以及该哨兵监听的主节点的名称、IP、端口号和纪元信息。
下面的代码就展示了 hello 消息的生成和发布,你可以看下。 //hello消息包含的内容 snprintf(payload,sizeof(payload), “%s,%d,%s,%llu,” //当前哨兵实例的信息,包括ip、端口号、ID和当前纪元 “%s,%s,%d,%llu”, //当前主节点的信息,包括名称、IP、端口号和纪元 announce_ip, announce_port, sentinel.myid, (unsigned long long) sentinel.current_epoch, master->name,master_addr->ip,master_addr->port, (unsigned long long) master->config_epoch); //向主节点的hello频道发布hello消息 retval = redisAsyncCommand(ri->link->cc, sentinelPublishReplyCallback, ri, “%s %s %s”, sentinelInstanceMapCommand(ri,”PUBLISH”), SENTINEL_HELLO_CHANNEL,payload);
这样,当哨兵通过 sentinelSendHello,向自己监听的主节点的”sentinel:hello”频道发布 hello 消息时,和该哨兵监听同一个主节点的其他哨兵,也会订阅主节点的”sentinel:hello”频道,从而就可以获得该频道上的 hello 消息了。
通过这样的通信方式,监听同一主节点的哨兵就能相互知道彼此的访问信息了。如此一来,哨兵就可以基于这些访问信息,执行主节点状态共同判断,以及进行 Leader 选举等操作了。
小结
今天这节课,我们了解了 Redis 实现的发布订阅通信方法。这个方法是提供了频道的方式,让要通信的双方按照频道来完成消息交互。而不同频道的不同名称,就代表了哨兵工作过程中的不同状态。当客户端需要了解哨兵的工作进度或是主节点的状态判断时,就可以通过订阅哨兵发布消息的频道来完成。
当然,对于一个哨兵来说,它一定会订阅的频道是它所监听的主节点的”sentinel:hello”频道。通过这个频道,监听同一主节点的不同哨兵就能通过频道上的 hello 消息,来交互彼此的访问信息了,比如哨兵的 IP、端口号等。
此外,在这节课,我还给你介绍了一个 C 语言函数可变参数的使用小技巧,当你开发发布订阅功能时,都需要生成发布的消息,而可变参数就可以用来生成长度不定的消息。希望你能把这个小技巧应用起来。
每课一问
如果我们在哨兵实例上执行 publish 命令,那么,这条命令是不是就是由 pubsub.c 文件中的 publishCommand 函数来处理的呢?
参考资料
https://learn.lianglianglee.com/%e4%b8%93%e6%a0%8f/Redis%20%e6%ba%90%e7%a0%81%e5%89%96%e6%9e%90%e4%b8%8e%e5%ae%9e%e6%88%98/25%20%20PubSub%e5%9c%a8%e4%b8%bb%e4%bb%8e%e6%95%85%e9%9a%9c%e5%88%87%e6%8d%a2%e6%97%b6%e6%98%af%e5%a6%82%e4%bd%95%e5%8f%91%e6%8c%a5%e4%bd%9c%e7%94%a8%e7%9a%84%ef%bc%9f.md
更多学习
更多实时资讯,前沿技术,生活趣事。尽在【老马啸西风】
交流社群:[交流群信息](https://mp.weixin.qq.com/s/rkSvXxiiLGjl3S-ZOZCr0Q)
