01 etcd的前世今生:为什么Kubernetes使用etcd? 你好,我是唐聪。
今天是专栏课程的第一讲,我们就从etcd的前世今生讲起。让我们一起穿越回2013年,看看etcd最初是在什么业务场景下被设计出来的?
2013年,有一个叫CoreOS的创业团队,他们构建了一个产品,Container Linux,它是一个开源、轻量级的操作系统,侧重自动化、快速部署应用服务,并要求应用程序都在容器中运行,同时提供集群化的管理方案,用户管理服务就像单机一样方便。
他们希望在重启任意一节点的时候,用户的服务不会因此而宕机,导致无法提供服务,因此需要运行多个副本。但是多个副本之间如何协调,如何避免变更的时候所有副本不可用呢?
为了解决这个问题,CoreOS团队需要一个协调服务来存储服务配置信息、提供分布式锁等能力。怎么办呢?当然是分析业务场景、痛点、核心目标,然后是基于目标进行方案选型,评估是选择社区开源方案还是自己造轮子。这其实就是我们遇到棘手问题时的通用解决思路,CoreOS团队同样如此。
假设你是CoreOS团队成员,你认为在这样的业务场景下,理想中的解决方案应满足哪些目标呢?
如果你有过一些开发经验,应该能想到一些关键点了,我根据自己的经验来总结一下,一个协调服务,理想状态下大概需要满足以下五个目标:
- 可用性角度:高可用。协调服务作为集群的控制面存储,它保存了各个服务的部署、运行信息。若它故障,可能会导致集群无法变更、服务副本数无法协调。业务服务若此时出现故障,无法创建新的副本,可能会影响用户数据面。
- 数据一致性角度:提供读取“最新”数据的机制。既然协调服务必须具备高可用的目标,就必然不能存在单点故障(single point of failure),而多节点又引入了新的问题,即多个节点之间的数据一致性如何保障?比如一个集群3个节点A、B、C,从节点A、B获取服务镜像版本是新的,但节点C因为磁盘 I/O异常导致数据更新缓慢,若控制端通过C节点获取数据,那么可能会导致读取到过期数据,服务镜像无法及时更新。
- 容量角度:低容量、仅存储关键元数据配置。协调服务保存的仅仅是服务、节点的配置信息(属于控制面配置),而不是与用户相关的数据。所以存储上不需要考虑数据分片,无需过度设计。
- 功能:增删改查,监听数据变化的机制。协调服务保存了服务的状态信息,若服务有变更或异常,相比控制端定时去轮询检查一个个服务状态,若能快速推送变更事件给控制端,则可提升服务可用性、减少协调服务不必要的性能开销。
- 运维复杂度:可维护性。在分布式系统中往往会遇到硬件Bug、软件Bug、人为操作错误导致节点宕机,以及新增、替换节点等运维场景,都需要对协调服务成员进行变更。若能提供API实现平滑地变更成员节点信息,就可以大大降低运维复杂度,减少运维成本,同时可避免因人工变更不规范可能导致的服务异常。
了解完理想中的解决方案目标,我们再来看CoreOS团队当时为什么选择了从0到1开发一个新的协调服务呢?
如果使用开源软件,当时其实是有ZooKeeper的,但是他们为什么不用ZooKeeper呢?我们来分析一下。
从高可用性、数据一致性、功能这三个角度来说,ZooKeeper是满足CoreOS诉求的。然而当时的ZooKeeper不支持通过API安全地变更成员,需要人工修改一个个节点的配置,并重启进程。
若变更姿势不正确,则有可能出现脑裂等严重故障。适配云环境、可平滑调整集群规模、在线变更运行时配置是CoreOS的期望目标,而ZooKeeper在这块的可维护成本相对较高。
其次ZooKeeper是用 Java 编写的,部署较繁琐,占用较多的内存资源,同时ZooKeeper RPC的序列化机制用的是Jute,自己实现的RPC API。无法使用curl之类的常用工具与之互动,CoreOS期望使用比较简单的HTTP + JSON。
因此,CoreOS决定自己造轮子,那CoreOS团队是如何根据系统目标进行技术方案选型的呢?
etcd v1和v2诞生
首先我们来看服务高可用及数据一致性。前面我们提到单副本存在单点故障,而多副本又引入数据一致性问题。
因此为了解决数据一致性问题,需要引入一个共识算法,确保各节点数据一致性,并可容忍一定节点故障。常见的共识算法有Paxos、ZAB、Raft等。CoreOS团队选择了易理解实现的Raft算法,它将复杂的一致性问题分解成Leader选举、日志同步、安全性三个相对独立的子问题,只要集群一半以上节点存活就可提供服务,具备良好的可用性。
其次我们再来看数据模型(Data Model)和API。数据模型参考了ZooKeeper,使用的是基于目录的层次模式。API相比ZooKeeper来说,使用了简单、易用的REST API,提供了常用的Get/Set/Delete/Watch等API,实现对key-value数据的查询、更新、删除、监听等操作。
key-value存储引擎上,ZooKeeper使用的是Concurrent HashMap,而etcd使用的是则是简单内存树,它的节点数据结构精简后如下,含节点路径、值、孩子节点信息。这是一个典型的低容量设计,数据全放在内存,无需考虑数据分片,只能保存key的最新版本,简单易实现。
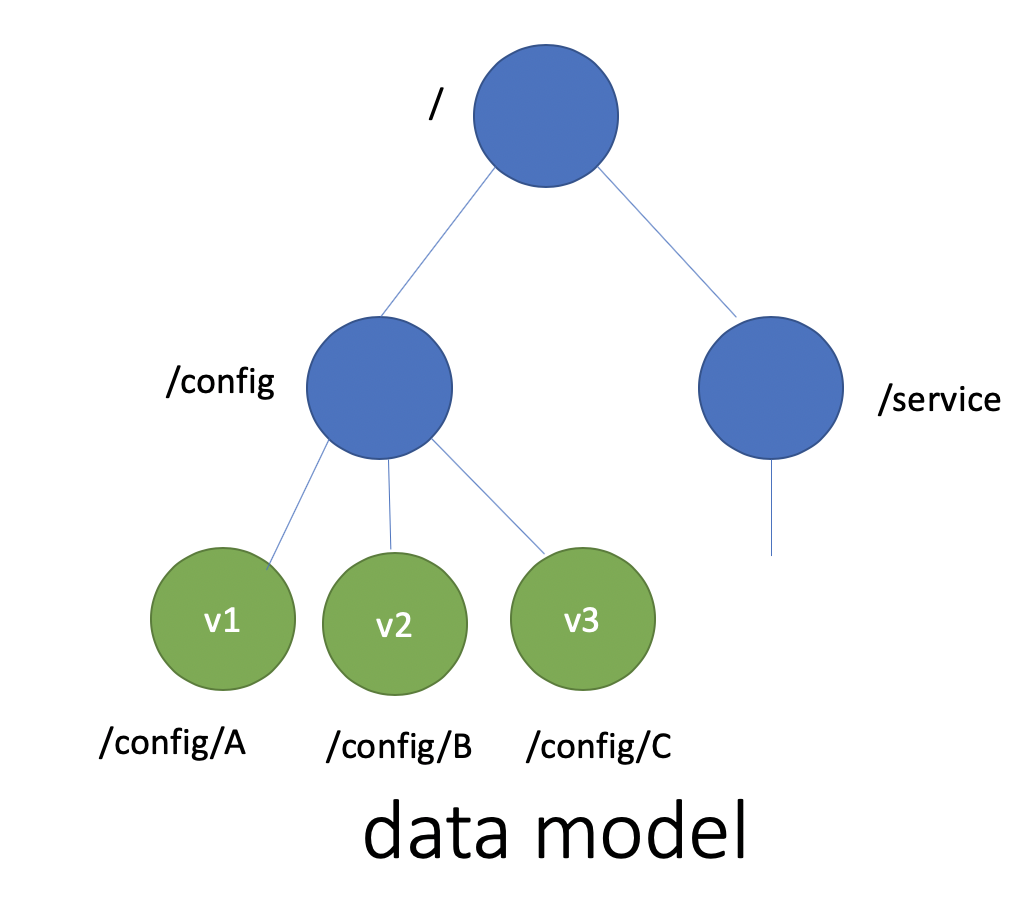 type node struct { Path string //节点路径 Parent /node //关联父亲节点 Value string //key的value值 ExpireTime time.Time //过期时间 Children map[string]/node //此节点的孩子节点 }
type node struct { Path string //节点路径 Parent /node //关联父亲节点 Value string //key的value值 ExpireTime time.Time //过期时间 Children map[string]/node //此节点的孩子节点 }
最后我们再来看可维护性。Raft算法提供了成员变更算法,可基于此实现成员在线、安全变更,同时此协调服务使用Go语言编写,无依赖,部署简单。
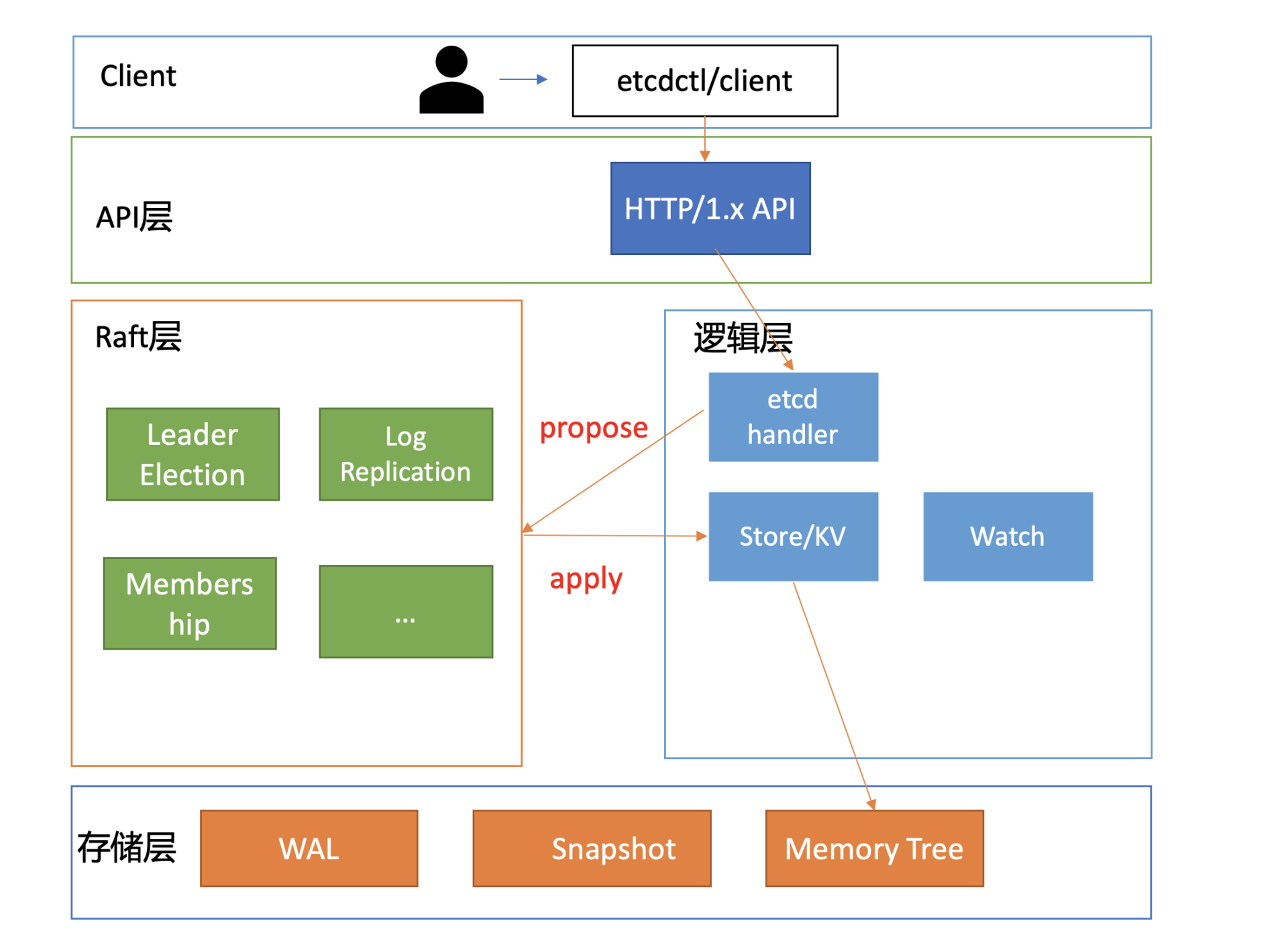
基于以上技术方案和架构图,CoreOS团队在2013年8月对外发布了第一个测试版本v0.1,API v1版本,命名为etcd。
那么etcd这个名字是怎么来的呢?其实它源于两个方面,unix的“/etc”文件夹和分布式系统(“D”istribute system)的D,组合在一起表示etcd是用于存储分布式配置的信息存储服务。
v0.1版本实现了简单的HTTP Get/Set/Delete/Watch API,但读数据一致性无法保证。v0.2版本,支持通过指定consistent模式,从Leader读取数据,并将Test And Set机制修正为CAS(Compare And Swap),解决原子更新的问题,同时发布了新的API版本v2,这就是大家熟悉的etcd v2版本,第一个非stable版本。
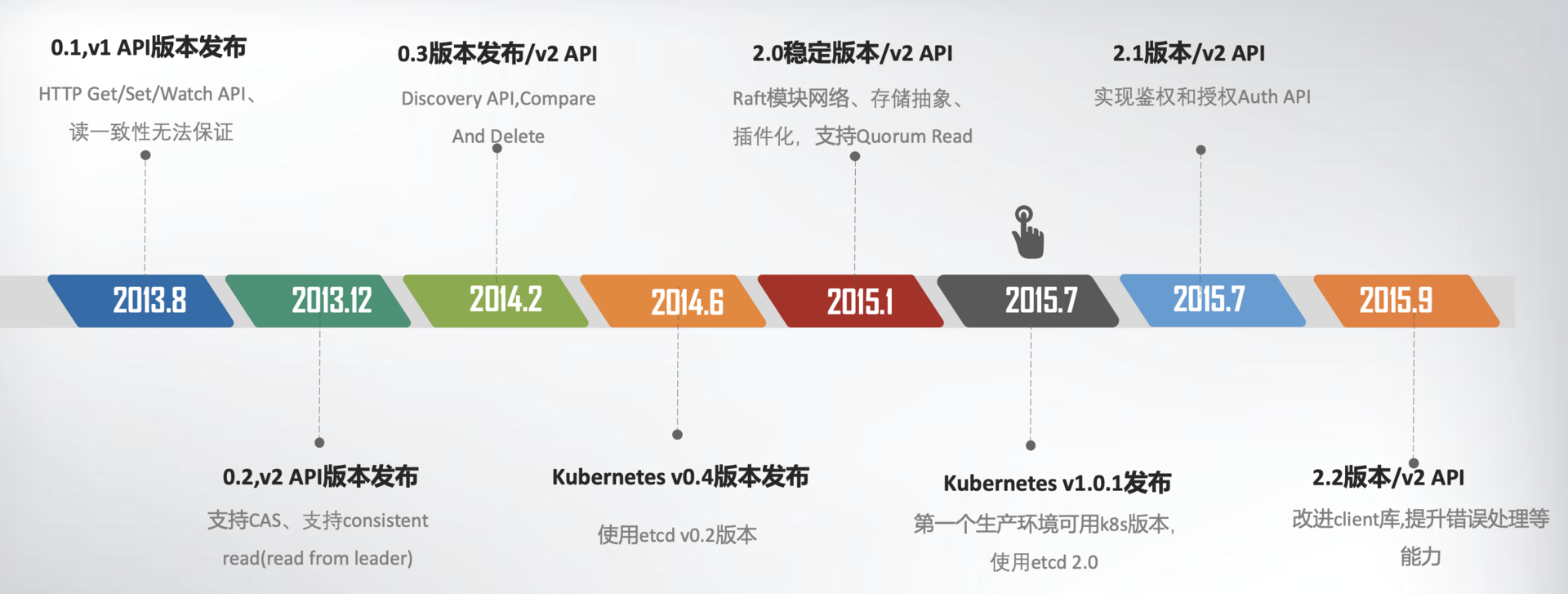
下面,我用一幅时间轴图,给你总结一下etcd v1/v2关键特性。
为什么Kubernetes使用etcd?
这张图里,我特别标注出了Kubernetes的发布时间点,这个非常关键。我们必须先来说说这个事儿,也就是Kubernetes和etcd的故事。
2014年6月,Google的Kubernetes项目诞生了,我们前面所讨论到Go语言编写、etcd高可用、Watch机制、CAS、TTL等特性正是Kubernetes所需要的,它早期的0.4版本,使用的正是etcd v0.2版本。
Kubernetes是如何使用etcd v2这些特性的呢?举几个简单小例子。
当你使用Kubernetes声明式API部署服务的时候,Kubernetes的控制器通过etcd Watch机制,会实时监听资源变化事件,对比实际状态与期望状态是否一致,并采取协调动作使其一致。Kubernetes更新数据的时候,通过CAS机制保证并发场景下的原子更新,并通过对key设置TTL来存储Event事件,提升Kubernetes集群的可观测性,基于TTL特性,Event事件key到期后可自动删除。
Kubernetes项目使用etcd,除了技术因素也与当时的商业竞争有关。CoreOS是Kubernetes容器生态圈的核心成员之一。
当时Docker容器浪潮正席卷整个开源技术社区,CoreOS也将容器集成到自家产品中。一开始与Docker公司还是合作伙伴,然而Docker公司不断强化Docker的PaaS平台能力,强势控制Docker社区,这与CoreOS核心商业战略出现了冲突,也损害了Google、RedHat等厂商的利益。
最终CoreOS与Docker分道扬镳,并推出了rkt项目来对抗Docker,然而此时Docker已深入人心,CoreOS被Docker全面压制。
以Google、RedHat为首的阵营,基于Google多年的大规模容器管理系统Borg经验,结合社区的建议和实践,构建以Kubernetes为核心的容器生态圈。相比Docker的垄断、独裁,Kubernetes社区推行的是民主、开放原则,Kubernetes每一层都可以通过插件化扩展,在Google、RedHat的带领下不断发展壮大,etcd也进入了快速发展期。
在2015年1月,CoreOS发布了etcd第一个稳定版本2.0,支持了quorum read,提供了严格的线性一致性读能力。7月,基于etcd 2.0的Kubernetes第一个生产环境可用版本v1.0.1发布了,Kubernetes开始了新的里程碑的发展。
etcd v2在社区获得了广泛关注,GitHub star数在2015年6月就高达6000+,超过500个项目使用,被广泛应用于配置存储、服务发现、主备选举等场景。
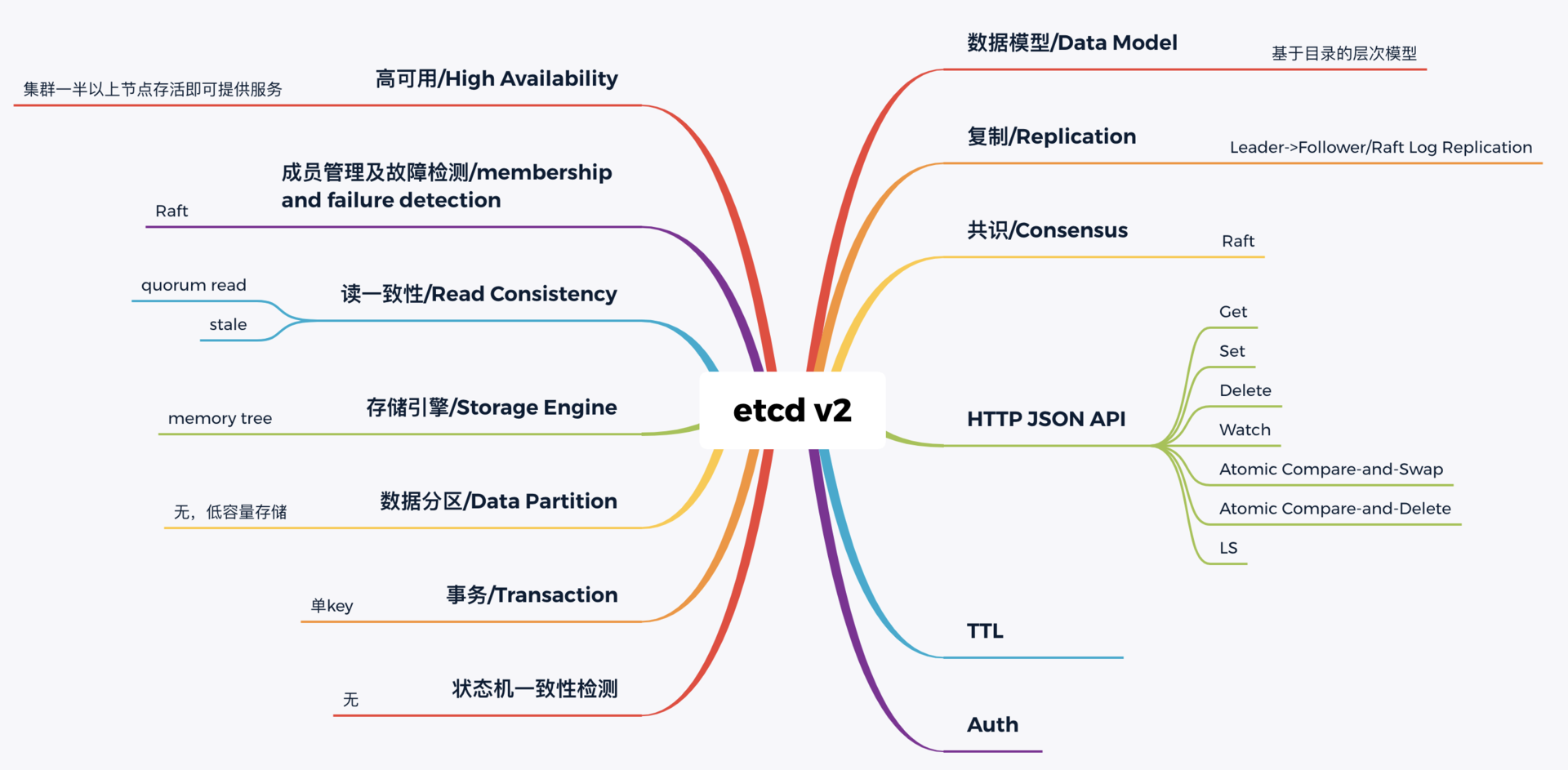
下图我从构建分布式系统的核心要素角度,给你总结了etcd v2核心技术点。无论是NoSQL存储还是SQL存储、文档存储,其实大家要解决的问题都是类似的,基本就是图中总结的数据模型、复制、共识算法、API、事务、一致性、成员故障检测等方面。
希望通过此图帮助你了解从0到1如何构建、学习一个分布式系统,要解决哪些技术点,在心中有个初步认识,后面的课程中我会再深入介绍。
etcd v3诞生
然而随着Kubernetes项目不断发展,v2版本的瓶颈和缺陷逐渐暴露,遇到了若干性能和稳定性问题,Kubernetes社区呼吁支持新的存储、批评etcd不可靠的声音开始不断出现。
具体有哪些问题呢?我给你总结了如下图:
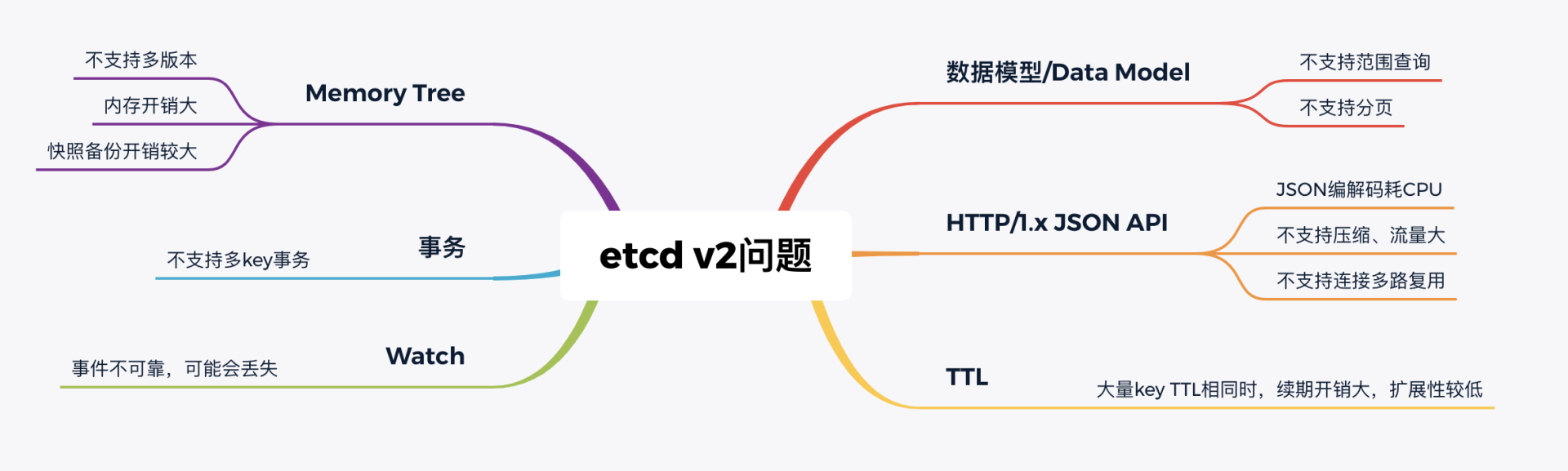
下面我分别从功能局限性、Watch事件的可靠性、性能、内存开销来分别给你剖析etcd v2的问题。
首先是功能局限性问题。它主要是指etcd v2不支持范围和分页查询、不支持多key事务。
第一,etcd v2不支持范围查询和分页。分页对于数据较多的场景是必不可少的。在Kubernetes中,在集群规模增大后,Pod、Event等资源可能会出现数千个以上,但是etcd v2不支持分页,不支持范围查询,大包等expensive request会导致严重的性能乃至雪崩问题。
第二,etcd v2不支持多key事务。在实际转账等业务场景中,往往我们需要在一个事务中同时更新多个key。
然后是Watch机制可靠性问题。Kubernetes项目严重依赖etcd Watch机制,然而etcd v2是内存型、不支持保存key历史版本的数据库,只在内存中使用滑动窗口保存了最近的1000条变更事件,当etcd server写请求较多、网络波动时等场景,很容易出现事件丢失问题,进而又触发client数据全量拉取,产生大量expensive request,甚至导致etcd雪崩。
其次是性能瓶颈问题。etcd v2早期使用了简单、易调试的HTTP/1.x API,但是随着Kubernetes支撑的集群规模越来越大,HTTP/1.x协议的瓶颈逐渐暴露出来。比如集群规模大时,由于HTTP/1.x协议没有压缩机制,批量拉取较多Pod时容易导致APIServer和etcd出现CPU高负载、OOM、丢包等问题。
另一方面,etcd v2 client会通过HTTP长连接轮询Watch事件,当watcher较多的时候,因HTTP/1.x不支持多路复用,会创建大量的连接,消耗server端过多的socket和内存资源。
同时etcd v2支持为每个key设置TTL过期时间,client为了防止key的TTL过期后被删除,需要周期性刷新key的TTL。
实际业务中很有可能若干key拥有相同的TTL,可是在etcd v2中,即使大量key TTL一样,你也需要分别为每个key发起续期操作,当key较多的时候,这会显著增加集群负载、导致集群性能显著下降。
最后是内存开销问题。etcd v2在内存维护了一颗树来保存所有节点key及value。在数据量场景略大的场景,如配置项较多、存储了大量Kubernetes Events, 它会导致较大的内存开销,同时etcd需要定时把全量内存树持久化到磁盘。这会消耗大量的CPU和磁盘 I/O资源,对系统的稳定性造成一定影响。
为什么etcd v2有以上若干问题,Consul等其他竞品依然没有被Kubernetes支持呢?
一方面当时包括Consul在内,没有一个开源项目是十全十美完全满足Kubernetes需求。而CoreOS团队一直在聆听社区的声音并积极改进,解决社区的痛点。用户吐槽etcd不稳定,他们就设计实现自动化的测试方案,模拟、注入各类故障场景,及时发现修复Bug,以提升etcd稳定性。
另一方面,用户吐槽性能问题,针对etcd v2各种先天性缺陷问题,他们从2015年就开始设计、实现新一代etcd v3方案去解决以上痛点,并积极参与Kubernetes项目,负责etcd v2到v3的存储引擎切换,推动Kubernetes项目的前进。同时,设计开发通用压测工具、输出Consul、ZooKeeper、etcd性能测试报告,证明etcd的优越性。
etcd v3就是为了解决以上稳定性、扩展性、性能问题而诞生的。
在内存开销、Watch事件可靠性、功能局限上,它通过引入B-tree、boltdb实现一个MVCC数据库,数据模型从层次型目录结构改成扁平的key-value,提供稳定可靠的事件通知,实现了事务,支持多key原子更新,同时基于boltdb的持久化存储,显著降低了etcd的内存占用、避免了etcd v2定期生成快照时的昂贵的资源开销。
性能上,首先etcd v3使用了gRPC API,使用protobuf定义消息,消息编解码性能相比JSON超过2倍以上,并通过HTTP/2.0多路复用机制,减少了大量watcher等场景下的连接数。
其次使用Lease优化TTL机制,每个Lease具有一个TTL,相同的TTL的key关联一个Lease,Lease过期的时候自动删除相关联的所有key,不再需要为每个key单独续期。
最后是etcd v3支持范围、分页查询,可避免大包等expensive request。
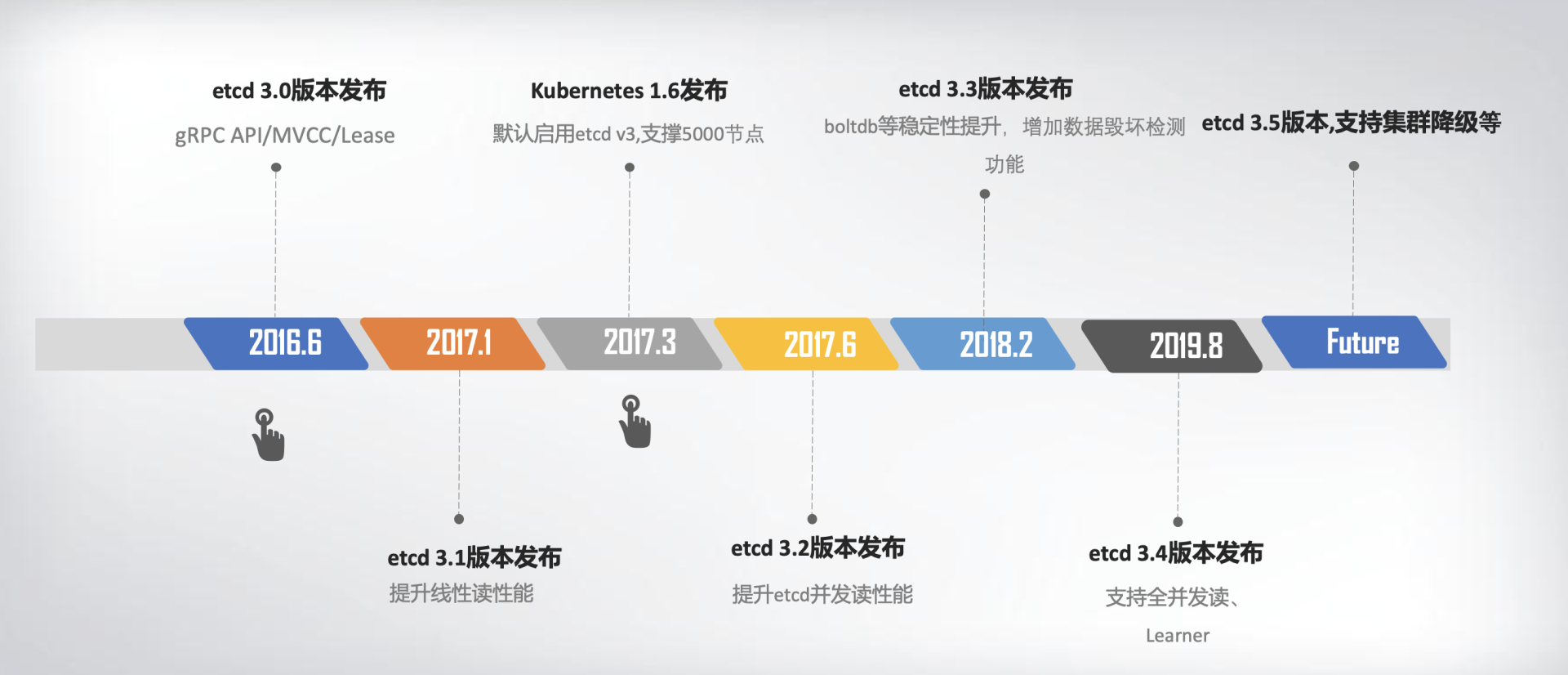
2016年6月,etcd 3.0诞生,随后Kubernetes 1.6发布,默认启用etcd v3,助力Kubernetes支撑5000节点集群规模。
下面的时间轴图,我给你总结了etcd3重要特性及版本发布时间。从图中你可以看出,从3.0到未来的3.5,更稳、更快是etcd的追求目标。
从2013年发布第一个版本v0.1到今天的3.5.0-pre,从v2到v3,etcd走过了7年的历程,etcd的稳定性、扩展性、性能不断提升。
发展到今天,在GitHub上star数超过34K。在Kubernetes的业务场景磨炼下它不断成长,走向稳定和成熟,成为技术圈众所周知的开源产品,而v3方案的发布,也标志着etcd进入了技术成熟期,成为云原生时代的首选元数据存储产品。
小结
最后我们来小结下今天的内容,我们从如下几个方面介绍了etcd的前世今生,并在过程中详细解读了为什么Kubernetes使用etcd:
- etcd诞生背景, etcd v2源自CoreOS团队遇到的服务协调问题。
- etcd目标,我们通过实际业务场景分析,得到理想中的协调服务核心目标:高可用、数据一致性、Watch、良好的可维护性等。而在CoreOS团队看来,高可用、可维护性、适配云、简单的API、良好的性能对他们而言是非常重要的,ZooKeeper无法满足所有诉求,因此决定自己构建一个分布式存储服务。
- 介绍了v2基于目录的层级数据模型和API,并从分布式系统的角度给你详细总结了etcd v2技术点。etcd的高可用、Watch机制与Kubernetes期望中的元数据存储是匹配的。etcd v2在Kubernetes的带动下,获得了广泛的应用,但也出现若干性能和稳定性、功能不足问题,无法满足Kubernetes项目发展的需求。
- CoreOS团队未雨绸缪,从问题萌芽时期就开始构建下一代etcd v3存储模型,分别从性能、稳定性、功能上等成功解决了Kubernetes发展过程中遇到的瓶颈,也捍卫住了作为Kubernetes存储组件的地位。
希望通过今天的介绍, 让你对etcd为什么有v2和v3两个大版本,etcd如何从HTTP/1.x API到gRPC API、单版本数据库到多版本数据库、内存树到boltdb、TTL到Lease、单key原子更新到支持多key事务的演进过程有个清晰了解。希望你能有所收获,在后续的课程中我会和你深入讨论各个模块的细节。
思考题
最后,我给你留了一个思考题。分享一下在你的项目中,你主要使用的是哪个etcd版本来解决什么问题呢?使用的etcd v2 API还是v3 API呢?在这过程中是否遇到过什么问题?
感谢你的阅读,欢迎你把思考和观点写在留言区,也欢迎你把这篇文章分享给更多的朋友一起阅读。
参考资料
https://learn.lianglianglee.com/%e4%b8%93%e6%a0%8f/etcd%e5%ae%9e%e6%88%98%e8%af%be/01%20etcd%e7%9a%84%e5%89%8d%e4%b8%96%e4%bb%8a%e7%94%9f%ef%bc%9a%e4%b8%ba%e4%bb%80%e4%b9%88Kubernetes%e4%bd%bf%e7%94%a8etcd%ef%bc%9f.md
更多学习
更多实时资讯,前沿技术,生活趣事。尽在【老马啸西风】
交流社群:[交流群信息](https://mp.weixin.qq.com/s/rkSvXxiiLGjl3S-ZOZCr0Q)
