动态规划原理
基本思想:问题的最优解如果可以由子问题的最优解推导得到,则可以先求解子问题的最优解,在构造原问题的最优解;若子问题有较多的重复出现,则可以自底向上从最终子问题向原问题逐步求解。
使用条件
可分为多个相关子问题,子问题的解被重复使用
Optimal substructure(优化子结构):
一个问题的优化解包含了子问题的优化解
缩小子问题集合,只需那些优化问题中包含的子问题,降低实现复杂性
我们可以自下而上的
Subteties(重叠子问题)
在问题的求解过程中,很多子问题的解将被多次使用。
动态规划算法的设计步骤:
分析优化解的结构
递归地定义最优解的代价
自底向上地计算优化解的代价保存之,并获取构造最优解的信息
根据构造最优解的信息构造优化解
动态规划特点:
把原始问题划分成一系列子问题;
求解每个子问题仅一次,并将其结果保存在一个表中,以后用到时直接存取,不重复计算,节省计算时间
自底向上地计算。
整体问题最优解取决于子问题的最优解(状态转移方程)(将子问题称为状态,最终状态的求解归结为其他状态的求解)
利用动态规划寻找最短路径
动态规划是运筹学的一个分支,是求解决策过程最优化的数学方法,通常情况下应用于最优化问题,这类问题一般有很多个可行的解,每个解有一个值,而我们希望从中找到最优的答案。
在计算机科学领域,应用动态规划的思想解决的最基本的一个问题就是:寻找有向无环图(篱笆网络)当中两个点之间的最短路径(实际应用于地图导航、语音识别、分词、机器翻译等等)。
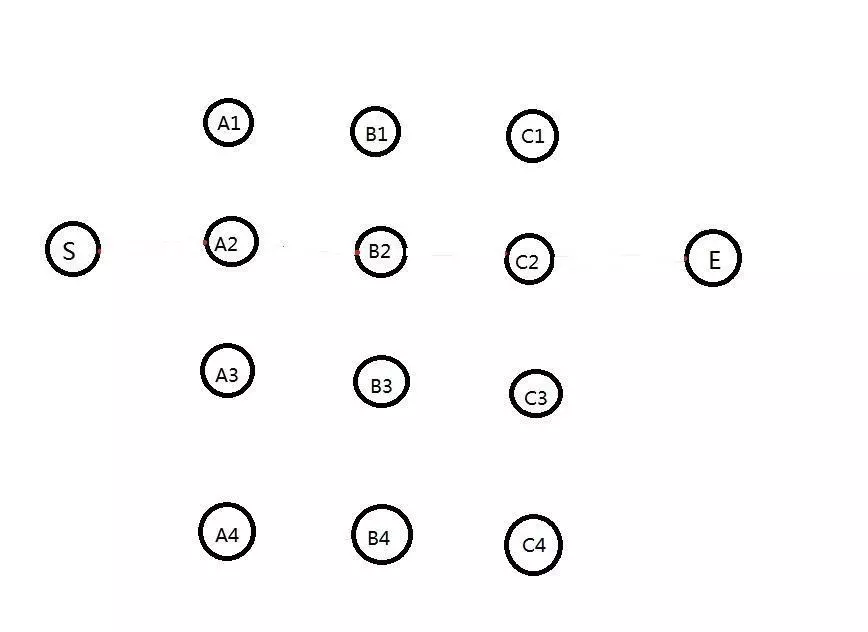
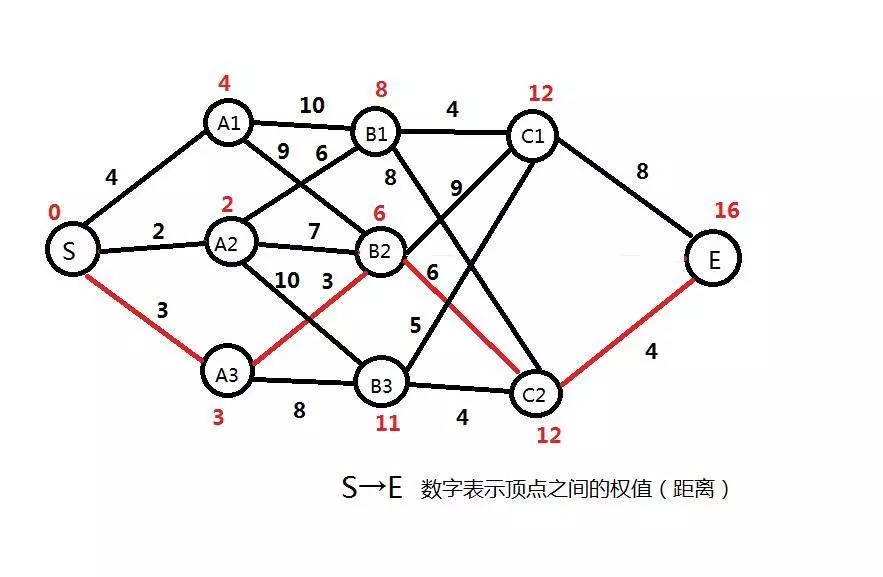
下面举一个比较简单的例子做说明:求S到E的最短路径。
如下图(各点之间距离不相同):
穷举法
我们知道,要找到S到E之间最短路径,最容易想到的方法就是穷举法。
也就是把所有可能的路径都例举出来。
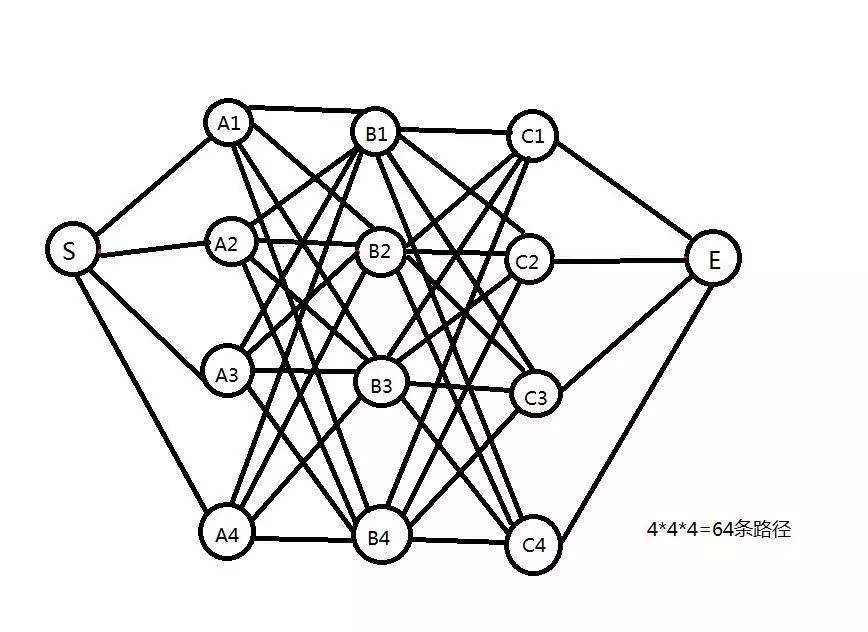
从S走向A层共有4种走法,从A层走向B层又有4种走法,从B层走向C层又有4种走法,然后C层走向E点只有一种选择。
所以最终我们穷举出了4X4X4=64种可能。
显然,这种方法必定可行。
但在实际的应用当中,对于数量极其庞大的结点数和边数的图,其计算复杂度也将会变得非常大,而计算效率也会随之降低。
因此,这里选择使用一种基于动态规划的方式来寻找最佳路径。
所谓动态规划。
其核心就是“动态”的概念,把大的问题细分为多个小的问题,基于每一步的结果再去寻找下一步的策略,通过每一步走过之后的局部最优去寻找全局最优。
这样解释比较抽象,下面直接用回刚刚的例子说明。如下图:
最短路径是存在的
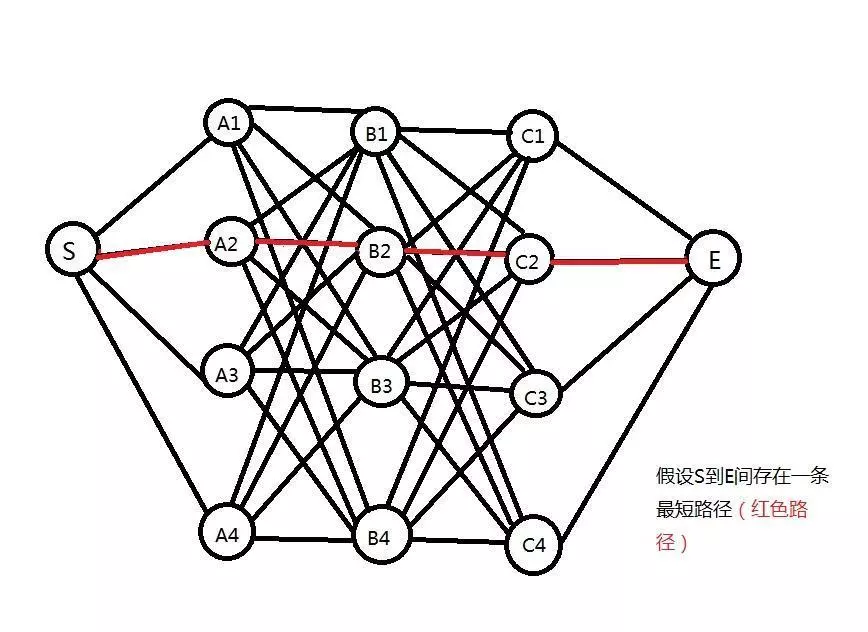
首先,我们假设S到E之间存在一条最短路径(红色),且这条路径经过C2点,那么我们便一定能够确定从S到C2的64条(4X4X4=64)子路径当中,该子路径一定最短。
(证明:反证法。如果S到C2之间存在一条更短的子路径,那么便可以用它来代替原先的路径,而原先的路径显然就不是最短了,这与原假设自相矛盾)。
同理,我们也可以得出从S到B2点为两点间最短子路径的结论。
这时候,真相便慢慢浮出水面:
既然如此,我们计算从S点出发到点C2的最短路径,是不是只要考虑从S出发到B层所有节点的最短路径就可以了?
答案是肯定的!
因为,从S到E的“全局最短”路径必定经过在这些“局部最短”子路径。
没错!这就是上面提及到的通过局部最优的最优去寻找全局最优,问题的规模被不断缩小!
接下来,要揭晓答案了!继续看下图:
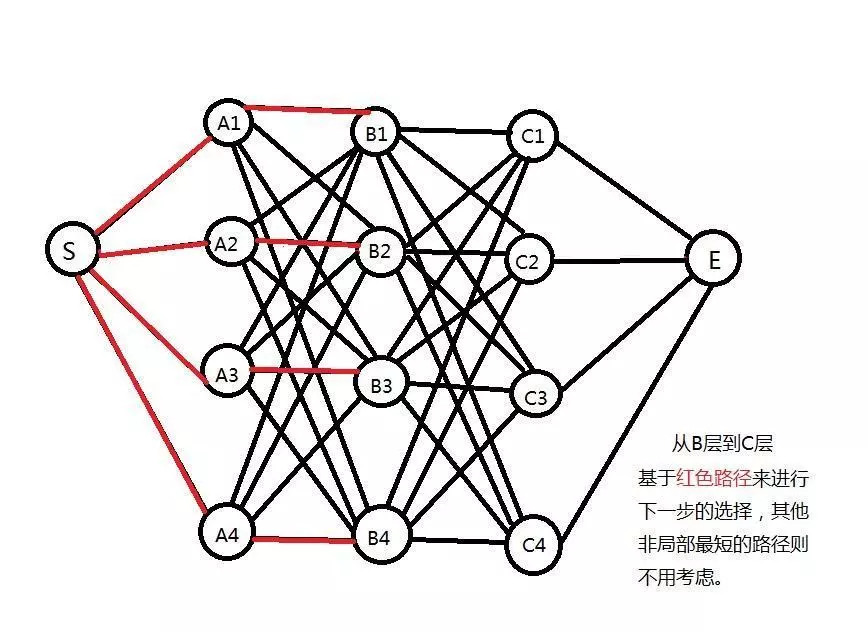
回顾之前的分析:我们计算从S起到C2点的最短路径时候只需要考虑从S出发到B层所有节点的最短路径,B层也如是。
对B2来说,一共有4条路线可以到达,分别是A1→B2,A2→B2,A3→B2,A4→B2。
我们需要做的就是把A2→B2这条最短路线保留,而其他3条删除掉(因为根据以上的分析,它们不可能构成全程的最短路线)。
OK,来到这里,我们会发现一个小“漏洞”,这段S→A2→B2→C2→E的路线只是我一厢情愿的假设,最短路径不一定是经过以上这些点。
所以,我们要把每层的每个节点都考虑进来。
完整算法
以下是具体的做法: step1:从点S出发。对于第一层的3个节点,算出它们的距离d(S,A1),d(S,A2),d(S,A3),d(S,A4),因为只有一步,所以这些距离都是S到它们各自的最短距离。
step2:对于B层的所有节点(B1,B2,B3,B4),要计算出S到它们的最短距离。我们知道,对于特定的节点B2,从S到它的路径可以经过A层的任何一个节点(A1,A2,A3,A4)。对应的路径长就是d(S,B2)=d(S,Ai)+d(Ai,B2)(其中i=1,2,3,4)。由于A层有4个节点(即i有4个取值),我们要一一计算,然后找到最小值。这样,对于B层的每个节点,都需要进行4次运算,而B层有4个节点,所以共有4X4=16次运算。
step3:这一步是该算法的核心。我们从step2计算得出的结果只保留4个最短路径值(每个节点保留一个)。那么,若从B层走向C层来说,该步骤的基数已经不再是4X4,而是变成了4!也就是说,从B层到C层的最短路径只需要基于B层得出的4个结果来计算。这种方法一直持续到最后一个状态,每一步计算的复杂度为相邻两层的计算复杂度为4X4乘积的正比!再通俗点说,连接这两两相邻层的计算符合变成了“+”号,取代了原先的“X”号。用这种方法,只需进行4X4X2=32次计算!
其实上述的算法就是著名的维特比算法,事实上非常简单!
若假设整个网格的宽度为D,网格长度为N,那么若使用穷举法整个最短路径的算法复杂度为O(D^N),而使用这种算法的计算复杂度为O(ND^2)。
试想一下,若D与N都非常大,使用维特比算法的效率将会提高几个数量级!
代码实现
同样是实现从S到E的最短路径。不过这次把刚刚的情况简化了一下,原理是相同的。
#include<stdlib.h>
#include<stdio.h>
#define x 9999
#define max 9999
int data[10][10];
int dist[10];//记录最短路径为多少
int path[10];//记录最短路径
int kmin(int,int);
void fpath(int a[][10]);
int froute(int a[][10]);
void main()
{
int i,m;
int a[10][10]=
{
{x,4,2,3,x,x,x,x,x,x},
{x,x,x,x,10,9,x,x,x,x},
{x,x,x,x,6,7,10,x,x,x},
{x,x,x,x,x,3,8,x,x,x},
{x,x,x,x,x,x,x,4,8,x},
{x,x,x,x,x,x,x,9,6,x},
{x,x,x,x,x,x,x,5,4,x},
{x,x,x,x,x,x,x,x,x,8},
{x,x,x,x,x,x,x,x,x,4},
{x,x,x,x,x,x,x,x,x,x}
};
/*for (i=0;i<10;i++)
{
for(j=0;j<10;j++)
printf("%d ",a[i][j]);
printf("\n");
}*/
fpath(a);
printf("最短路径大小为: %d\n",dist[9]);
m=froute(a);
for(i=m-1;i>=0;i--)
printf("最短路径经过: %d\n",path[i]);
}
void fpath(int a[][10])
{
int i,j,k;42 dist[0]=0;
for(i=1;i<10;i++)
{
k=max;
for(j=0;j<i;j++)
{
if(a[j][i]!=x)
if((dist[j]+a[j][i])<k)
k=dist[j]+a[j][i];
}
dist[i]=k;
}
}
int froute(int a[][10])
{
int j,b,k=1,i=9;
path[0]=10;
while(i>0)
{
for(j=i-1;j>=0;j--)
{
if(a[j][i]!=x)
{
b=dist[i]-a[j][i];
if(b==dist[j])
{
path[k++]=j+1;
i=j;
break;
}
}
}
}
return k;
}
设计最短路径的动态规划算法
算法导论中一般将设计动态规划算法归纳为下面几个步骤:
1)分析最优解的结构
2)递归定义最优解的值
3)自底向上计算最优解的值
4)从计算的最优解的值上面构建出最优解
最短路径的结构
从最优解的结构开始分析(我们假设没有权值为负的路径),对于图 G<V,E> 的所有结点对最短路径的问题,我们能知道一条最短路径的子路径都是最短路径。
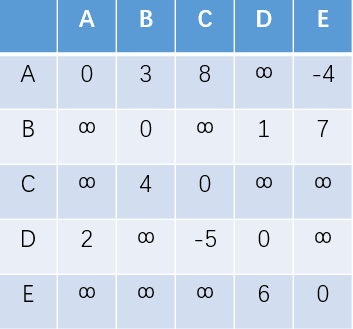
假设用邻接矩阵W=w(ij)来表示输入带权图,考虑从结点i到结点j的一条最短路径p,如果p最多有m(m为有限值)条边。
若i=j,则p的权值为0而且不包含其他边。
若i ≠ j,可以将i到j的路径转换为i -> k、k->j。
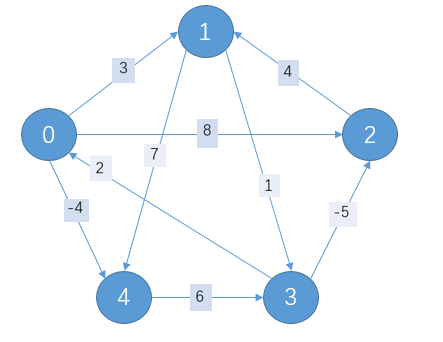
给定一个有向图
有向图
邻接矩阵
我们可以给出这个有向图的邻接矩阵
参考资料
https://www.jianshu.com/p/3b6569cefd0e
